

Global Time Optimal Trajectory Planning Method for Double Pendulum Crane Based on Pseudospectral Method
A time-optimized and trajectory planning technology, applied in the direction of load suspension components, transportation and packaging, etc., can solve problems such as the inability to achieve the optimal control effect of the global time and the inability to ensure the maximization of the operating efficiency of the crane system.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
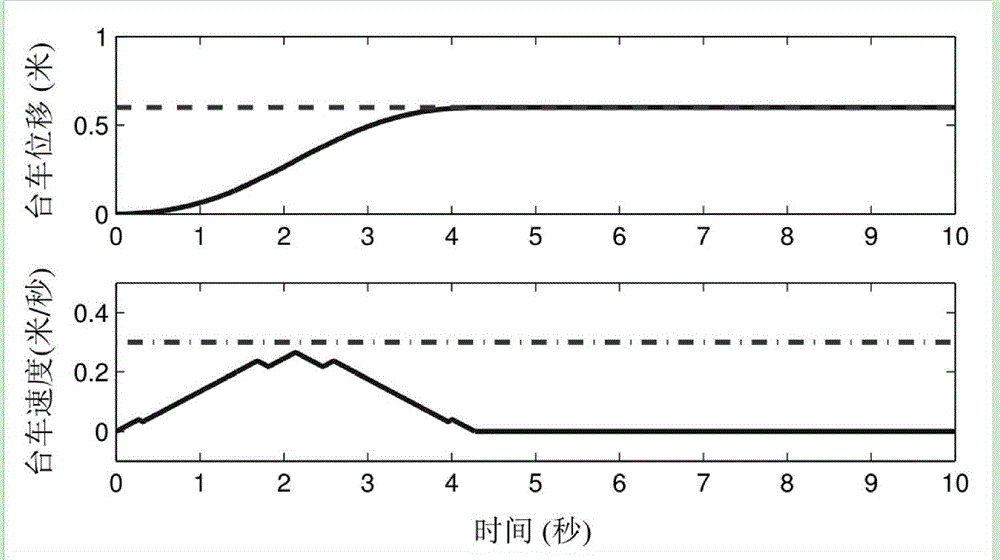
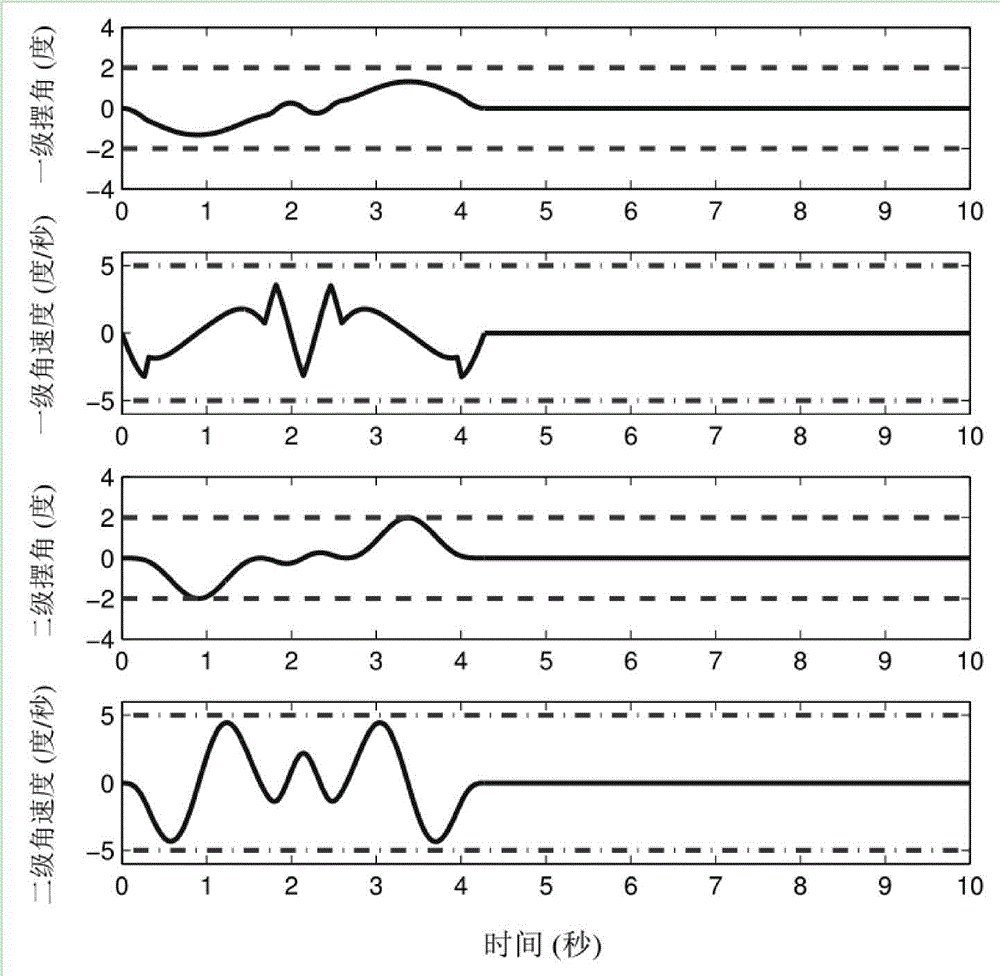
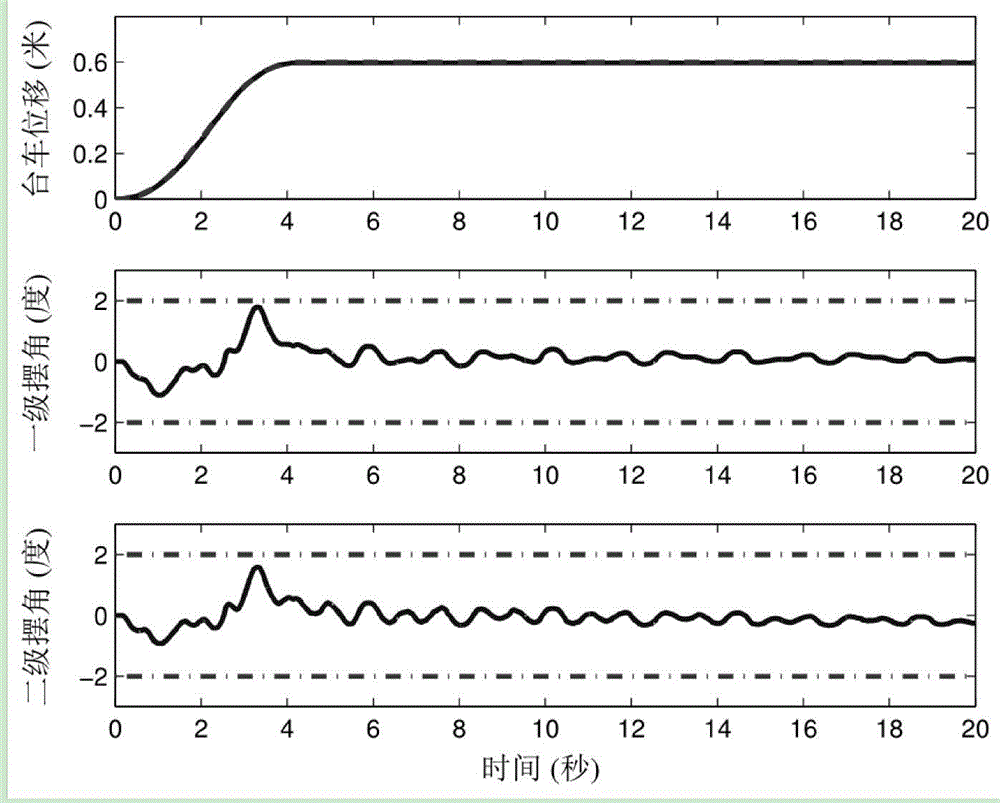
[0121] Analyzing the control objective of the crane system, considering various constraints including the two-stage swing angle and the upper limit of the speed and acceleration of the trolley, the following optimization problem with the transportation time as the cost function is obtained:
[0122]
[0123] Here, select the target position of the trolley as x f =0.6m, the trajectory constraints are as follows:
[0124] θ 1max = θ 2max =2deg, v max =0.3m / s,ω 1max = ω 2max =5deg / s,a max =0.15m / s 2
[0125] 2. Acceleration drive model establishment and optimization problem transformation
[0126] Analyze and utilize the double pendulum overhead crane system to establish the following acceleration drive system model:
[0127]
[0128] Since the specific expression of the model is too complicated, it is not repeated here, only the corresponding physical parameters of the crane system are given, as follows:
[0129] M=6.5kg,m 1 =2.003kg,m 2 =0.559kg, g=9.8m / s 2 ,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More