

Initial alignment method for MEMS-IMU
A technology of initial alignment and coordinate system, which is applied in the directions of navigation and navigation calculation tools through velocity/acceleration measurement, which can solve the problems that the calculation accuracy is directly affected by the zero offset of the gyro and the decrease of the alignment accuracy, so as to improve the initial accuracy. Accurate accuracy, improved alignment accuracy, and the effect of small computational effort
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] Below in conjunction with accompanying drawing and embodiment example the present invention is described in further detail:
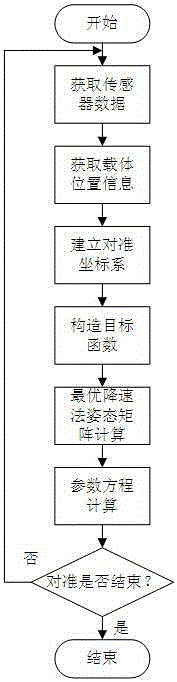
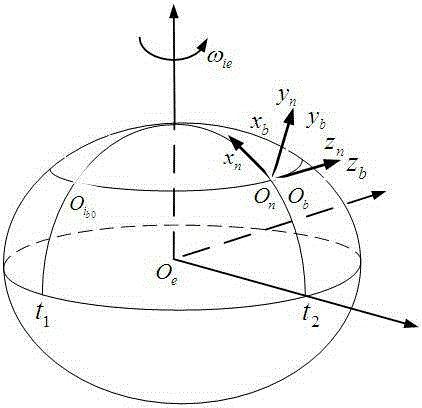
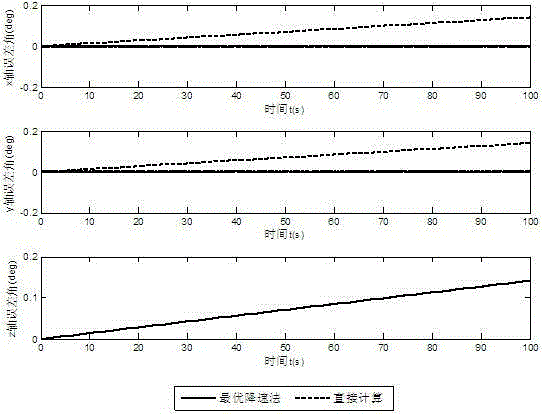
[0023] An initial alignment method for MEMS-IMU proposed by the present invention is to conduct a simulation experiment through Matlab simulation software, and compare it with the existing initial alignment algorithm of solidification inertial system. The simulation hardware environment is Intel(R) Core(TM) T9600CPU2.80GHz, 4GRAM, Windows7 operating system. figure 1 It is the flow chart of the whole algorithm, including the process of sensor data acquisition, attitude information update, alignment matrix calculation, etc.; figure 2 Indicates the definition of the commonly used attitude coordinate system involved in this patent, including the solidified inertial system system, carrier coordinate system system, navigation coordinate system system and the earth coordinate system Tie; image 3 During alignment for static conditions The at...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More