

Dual-mode real-time pseudo-range differential positioning system and pseudo-range correction data generation method
A real-time pseudorange difference, positioning system technology, applied in satellite radio beacon positioning systems, radio wave measurement systems, measurement devices and other directions, can solve the problems of low navigation accuracy, unable to achieve accurate vehicle navigation, and achieve a simple system. Effective and easy to implement and promote, and improve the effect of positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0031] The present invention will be further elaborated below in conjunction with the embodiments and the accompanying drawings.
[0032] Embodiment of dual-mode real-time pseudorange differential positioning system
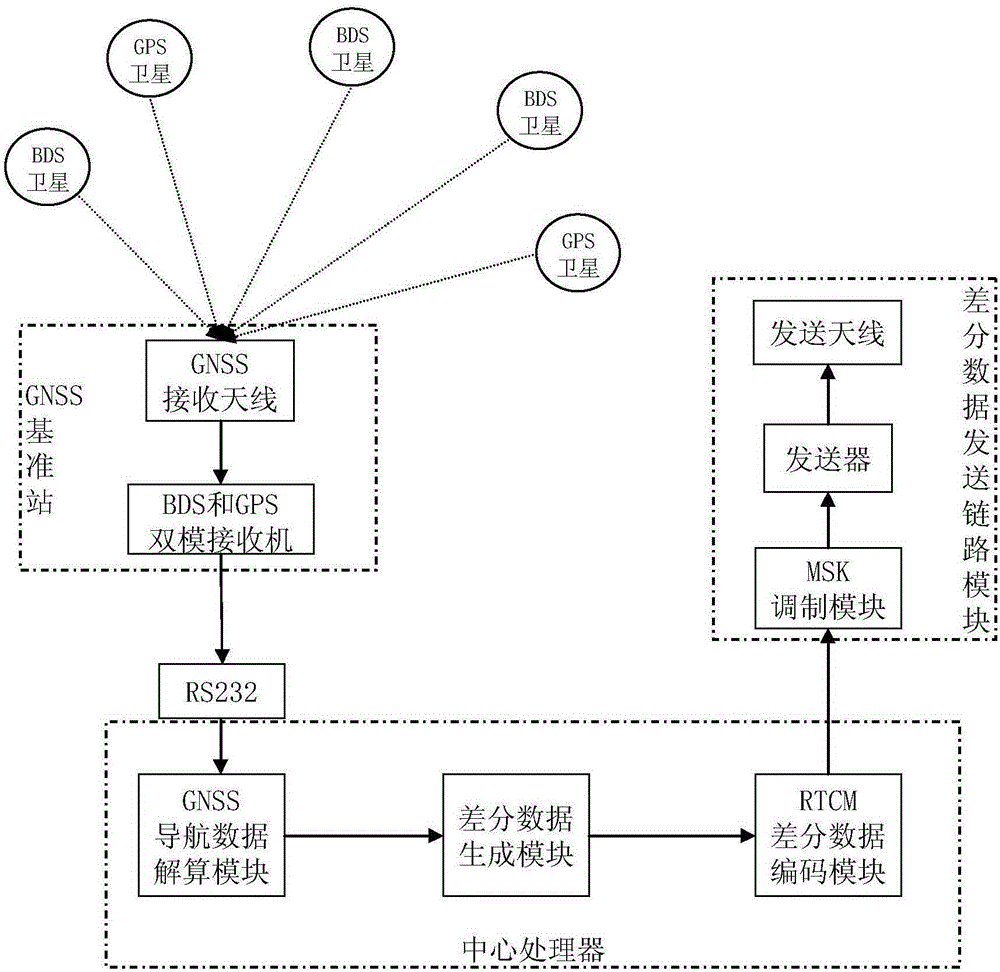
[0033] The structure of this BDS and GPS dual-mode real-time pseudorange differential positioning system embodiment is as follows figure 1 As shown, it includes the central processor and its connected GNSS reference station and differential data transmission link module. In this example, the GNSS reference station includes a BDS and GPS dual-mode receiver and its configured GNSS receiving antenna. The GNSS reference station is fixedly installed at a certain location, and its coordinate position is known accurately. The GNSS reference station receives multiple satellites in real time through the GNSS receiving antenna. Signals from GPS and BDS satellites.
[0034] In this example, the central processor includes a GNSS navigation data calculation module, a differ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More