Super-resolution image reconstruction method under synchronous orbit satellite attitude undersampling measurement
A technology for geostationary orbit satellites and low-resolution images, which is applied in image enhancement, image data processing, graphics and image conversion, etc., and can solve problems such as long acquisition time intervals and inability to use processing methods for super-resolution reconstruction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
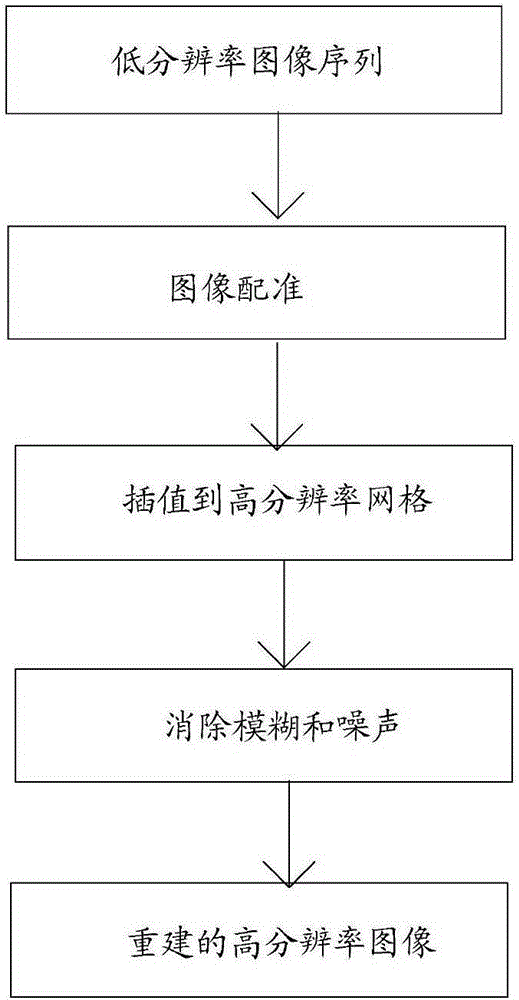
[0057] This embodiment provides a method for super-resolution image reconstruction under geostationary satellite attitude under-sampling measurement, including steps:
[0058] Step 101: Read temporally undersampled low-resolution image sequence I L1 ; Since the frequency of attitude measurement information acquired by geostationary orbit satellites is lower than the frequency of images taken by cameras, it is impossible to estimate two adjacent images based on the imaging formula established by the satellite attitude measurement information while acquiring each low-resolution image The relative displacement between them also seriously affects the effect of the subsequent super-resolution reconstruction algorithm. Therefore, a relative motion model is first established for low-resolution sequence images.
[0059] Step 102: Since the offset of the sequence image relative to the reference image is caused by the attitude stability of the satellite in geosynchronous orbit, the off...
Embodiment 2
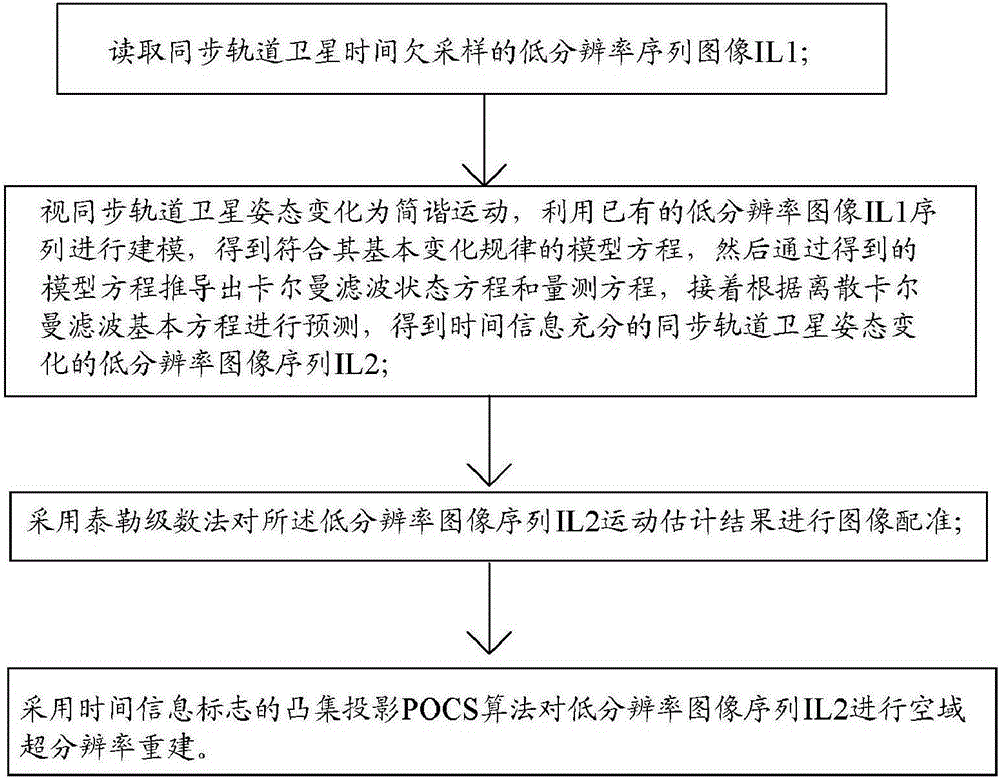
[0100] Such as figure 2 Shown, the concrete implementation method of the present invention is as follows:
[0101] (1) First read the time-undersampled low-resolution sequence image I L1 ;
[0102] (2) The attitude change of the satellite is a two-dimensional change. Because the camera and the star are considered as a complete rigid body in this patent, only the low-frequency information of its vibration is considered. First, a low-order model that can reflect its motion change is established according to the following formula , to obtain the complete image sequence I caused by the basic satellite attitude change L2rough ,
[0103]
[0104] X(t) refers to the displacement of the image in the x direction over time, A refers to the amplitude of the image in the x direction, ω x Refers to the vibration frequency of the image in the x direction, Refers to the phase of the image in the x direction, Y(t) refers to the displacement of the image in the y direction over time,...
Embodiment 3
[0137] On the basis of Embodiment 1 and Embodiment 2, this embodiment is an application embodiment.
[0138] It is known that a camera captures images at 0s, 5s, 10s, 25s, and 35s. According to the displacement relationship between the captured images, a low-order model reflecting its vibration changes is established as the state transition matrix in the next step, as follows,
[0139] X ( t ) = 5 sin ( 2 t + 3 ) Y ( t ) = 7 s i n ( 2 t + ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More