

Parameter setting method of sliding mode controller of servo system
A servo system and parameter setting technology, applied in control systems, AC motor control, electrical components, etc., can solve problems such as time and space lag, chattering, inaccurate measurement, etc., achieve the minimum amplitude and completely eliminate chattering , the effect of small tracking error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
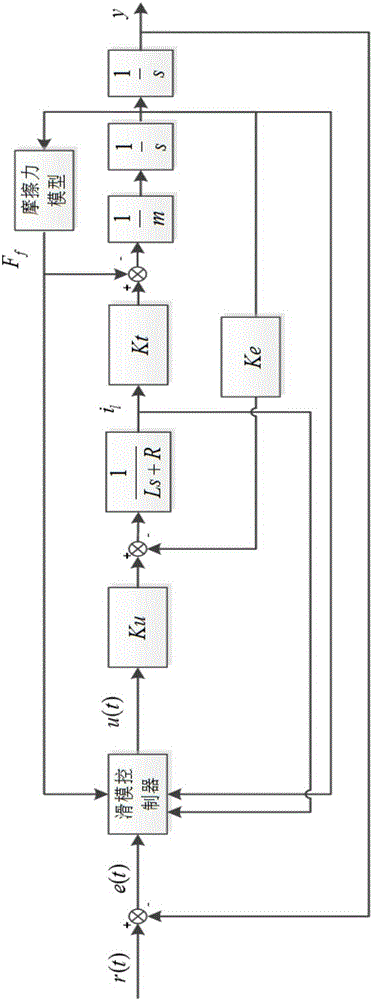
[0016] Specific implementation mode one: combine figure 1 Shown, illustrate the technical scheme of this embodiment, its method step is:
[0017] Step 1: Establish the servo system transfer function model according to the mechanical and electrical structure of the servo system, and obtain the parameters required in the model, the parameters include: the resistance of the motor, the load size of the motor, the back electromotive force constant of the motor, the torque constant of the motor, Armature circuit resistance, armature inductance, select the above corresponding parameters according to the structure of the actual controlled motor;
[0018] Step 2: Build the corresponding system simulink simulation model according to the servo system model and the adopted sliding mode controller, and reserve the input and output interfaces required by the particle swarm optimization algorithm;
[0019] Step 3: According to the requirements of position tracking error and velocity trackin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More