Multi-station self-coordinated intelligent robot system based on cloud network and control method of system
An intelligent robot and multi-station technology, applied in the direction of comprehensive factory control, comprehensive factory control, control/adjustment system, etc., can solve the problems of poor computing power of the robot group, difficult robot movement, poor system stability, etc., to improve communication stability performance, reduce basic communication capacity, and achieve high self-coordination
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
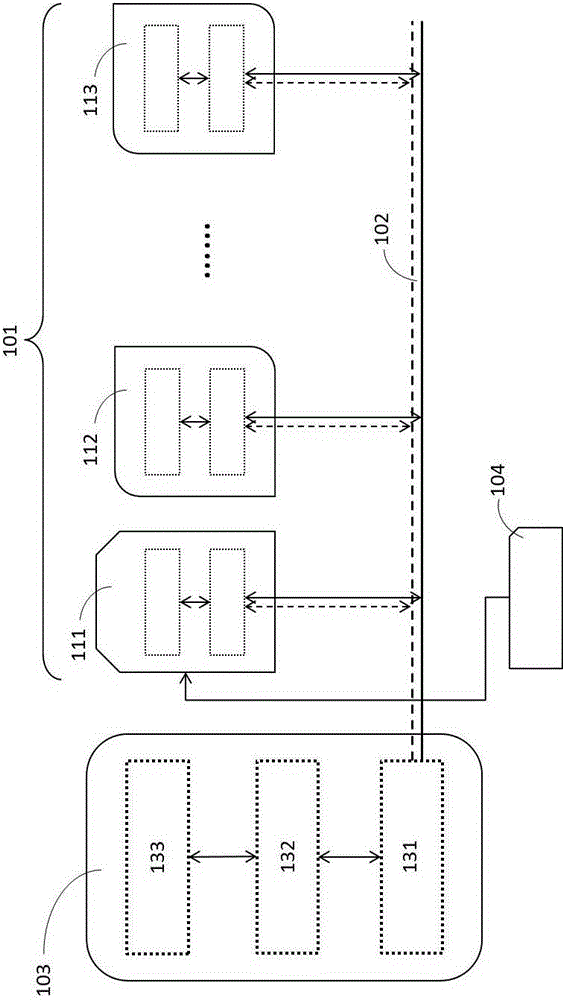
[0038] refer to figure 1 , this embodiment provides a multi-station self-coordinating intelligent robot system based on cloud network, the system includes: an intelligent robot group 101 , a communication control network 102 , and a cloud computing server 103 . The intelligent robot group 101 is connected with the cloud computing server 103 through the communication control network 102 . In order to ensure the stability of the system, the communication control network is arranged in the form of a wired network. The cloud computing server 103 mainly includes a communication layer 131 , a storage layer 132 , and a computing layer 133 .
[0039] The intelligent robot group 101 is a collection of multi-station intelligent robots. In the present embodiment, the intelligent robot group 101 includes the first active intelligent robot 111 and the first slave intelligent robot 112...the Nth slave intelligent robot 113. Slave intelligent robot family. Each intelligent robot includes ...
Embodiment 2
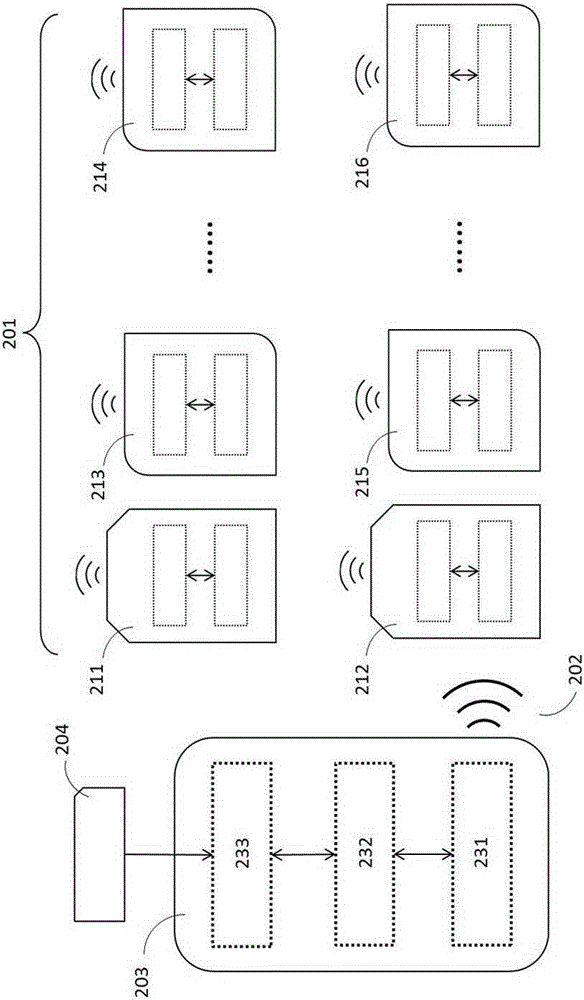
[0045] refer to figure 2 , this embodiment provides a cloud network-based multi-station self-coordinating intelligent robot system, the system includes: an intelligent robot group 201 , a communication control network 202 , and a cloud computing server 203 . The intelligent robot group 201 is connected with the cloud computing server 203 through the communication control network 202 . In order to reduce the space limitation of communication network erection, the communication control network is arranged in the form of wireless network. The cloud computing server 203 mainly includes a communication layer 231 , a storage layer 232 , and a computing layer 233 .
[0046] The intelligent robot group 201 is a collection of multi-station intelligent robots. In this embodiment, the intelligent robot group 201 includes: (1) the first intelligent robot group, which includes the first active intelligent robot 211 and the first slave intelligent robot 213 ... the slave intelligent robo...
Embodiment 3
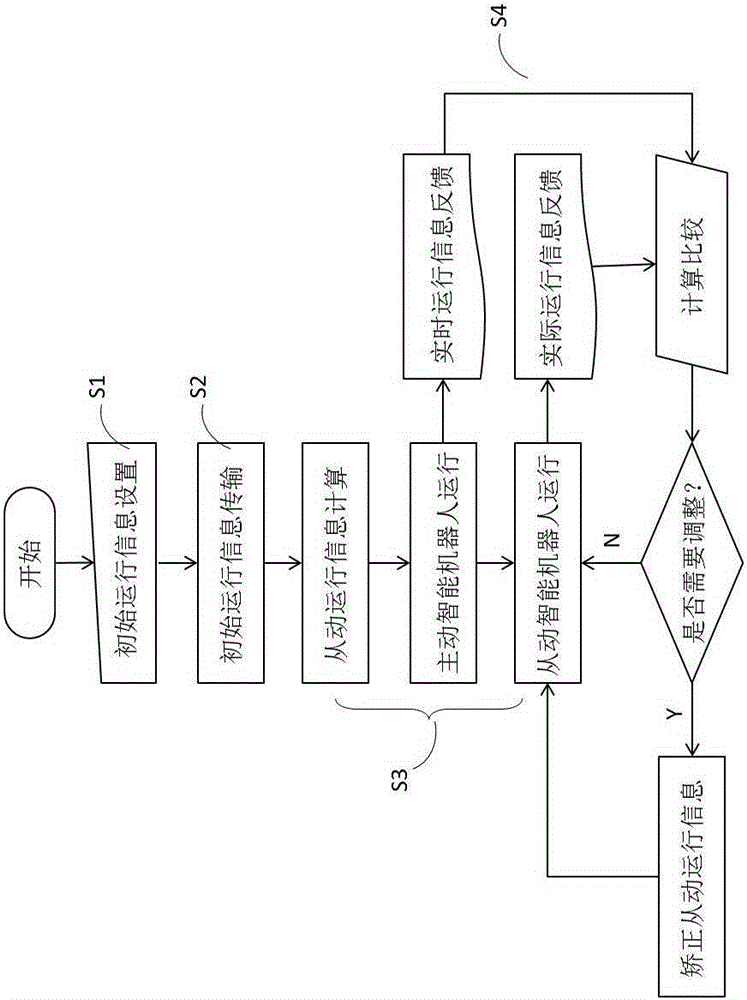
[0052] refer to image 3 , is a flow chart of a control method for a multi-station self-coordinating intelligent robot system based on a cloud network. The method mainly includes the following steps:
[0053] S1. Setting of the initial operation information of the first active intelligent robot;
[0054] S2. The first active intelligent robot transmits the initial operation information to the cloud computing server through the communication control network;
[0055] S3. The cloud computing server plans the driven operation information of the first driven intelligent robot based on the initial operation information of the first active intelligent robot, and transmits it to the first driven intelligent robot through the communication control network to control the first driven intelligent robot. robot action;
[0056] S4. The cloud computing server collects the real-time operation information of the first active robot and the actual operation information of the first slave ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More