

Active suspension type Mars rover moving mechanism
A mobile mechanism, suspension-type technology, applied in the direction of suspension, elastic suspension, extraterrestrial vehicle, etc., can solve the problems of inability to realize multiple deployments, large size of driving mechanism, complex suspension structure, etc., to achieve applicability Strong, easy to operate, simple structure effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
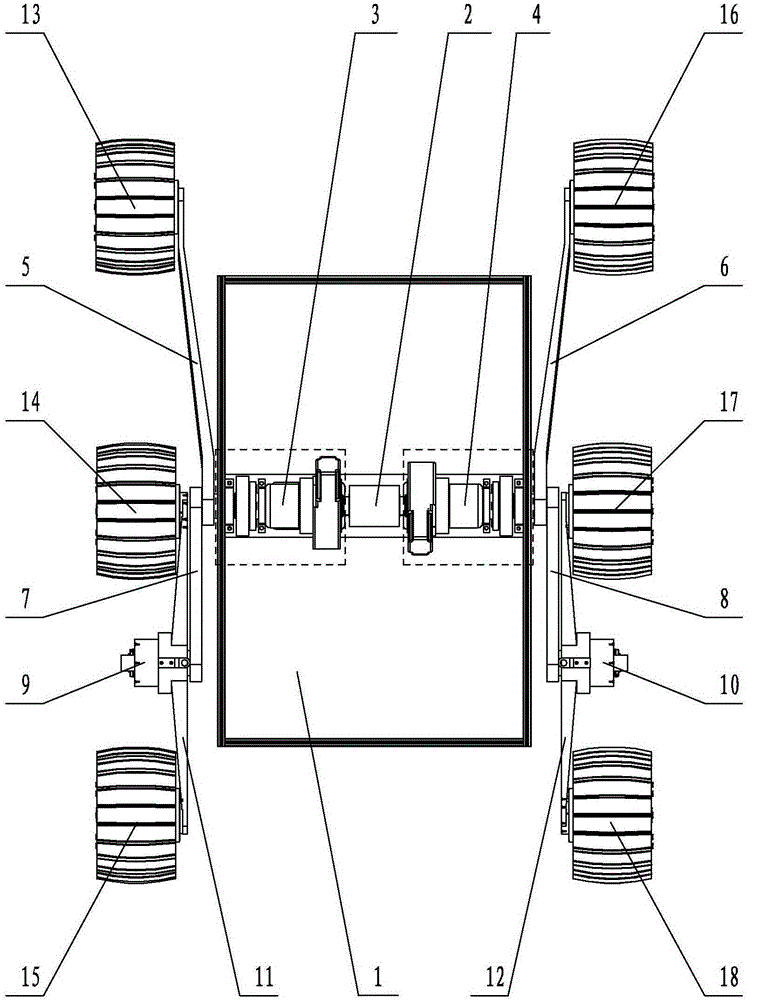
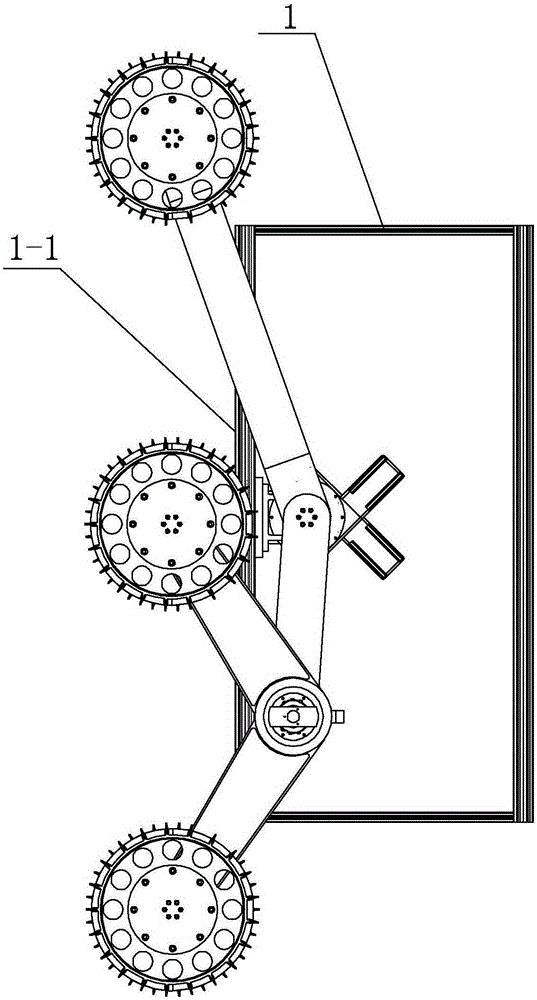
[0025] Specific implementation mode one: as Figure 1-5 As shown, the active suspension type Mars rover moving mechanism of this embodiment includes a carriage 1, a differential 2, a first angle adjuster 3, a second angle adjuster 4, a first main rocker arm long arm 5, a second Second main rocker arm long arm 6, first main rocker arm short arm 7, second main rocker arm short arm 8, first main and auxiliary rocker arm clutch 9, second main and auxiliary rocker arm clutch 10, first auxiliary rocker arm 11 , the second auxiliary rocker arm 12 and six wheels;
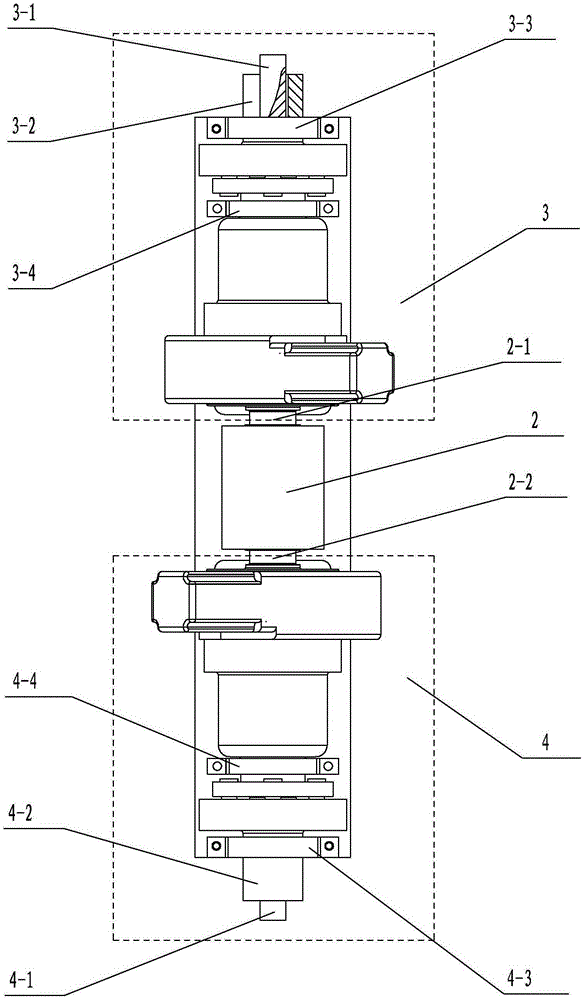
[0026] The differential 2 is fixed on the center of the upper end surface of the bottom plate 1-1 of the compartment 1, the output shaft 2-1 at one end of the differential 2 is connected with the first angle adjuster 3, and the output shaft at the other end of the differential 2 2-2 is connected with the second sheet angle adjuster 4, and the two output shafts of the differential 2 are coaxial with the first sheet angle ad...
specific Embodiment approach 2
[0029] Specific implementation mode two: as image 3 As shown, the active suspension type Mars rover moving mechanism described in this embodiment also includes a first support 3-3 and a second support 3-4, and the first opening angle adjuster 3 passes through the first support 3-3 and the second support 3-4. The second support 3 - 4 is installed on the upper end surface of the floor 1 - 1 of the carriage 1 . In this way, the first angle adjuster 3 is reliably fixed on the bottom plate 1-1 of the compartment 1, so that the positions of the components in the first angle adjuster 3 are fixed, and the two supports limit the position of the first angle adjuster 3. With respect to the degree of freedom of the carriage 1, the coaxiality of the axis of the rotating part of the first angle adjuster 3 and the output shaft 2-1 of the differential 2 is guaranteed. Other components and connections are the same as those in the first embodiment.
specific Embodiment approach 3
[0030] Specific implementation mode three: as image 3 As shown, the active suspension type Mars rover moving mechanism in this embodiment also includes a third support 4-3 and a fourth support 4-4, and the second opening angle adjuster 4 passes through the third support 4-3 and the fourth support 4-4. The fourth support 4-4 is installed on the upper end surface of the bottom plate 1-1 of the carriage 1. In this way, the second angle adjuster 4 is reliably fixed on the bottom plate 1-1 of the compartment 1, so that the positions of the components in the second angle adjuster 4 are fixed, and the two supports limit the second angle adjuster 4. With respect to the degree of freedom of the compartment 1, the coaxiality of the axis of the rotating part of the second angle adjuster 4 and the output shaft 2-2 of the differential 2 is guaranteed.
[0031] Other compositions and connections are the same as those in Embodiment 1 or 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More