

Underwater target cooperative tracking method based on consistency estimation and dormancy scheduling
An underwater target and consistent technology, applied in the direction of sound wave re-radiation, using re-radiation, measuring devices, etc., to achieve high accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
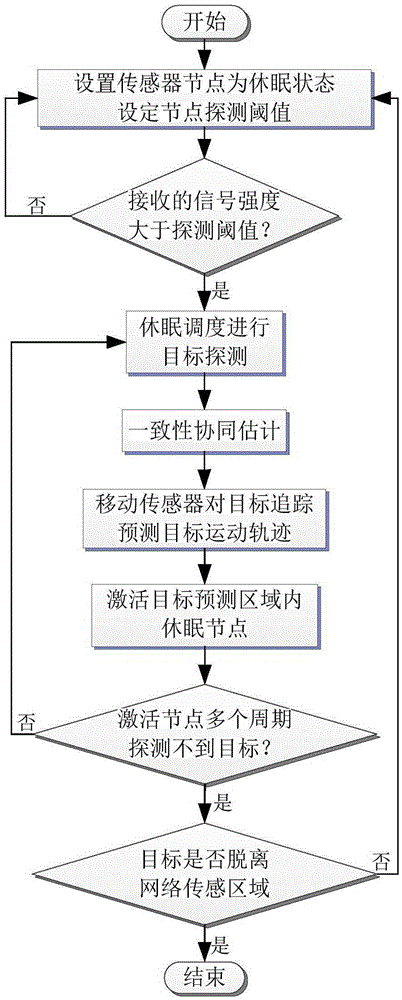
[0077] Embodiment 1: Using the consistency estimation algorithm, the underwater static and dynamic node perception and relay information are accurately processed, and then the target position information with a certain degree of confidence is obtained.
[0078] Then set the target t k and t k-1 Time position information p(t k ) and p(t k-1 ) to make a difference to get the moving speed v(t k ), and then predict the motion state of the target in the finite time domain p(t k ),…,p(t k+n ).
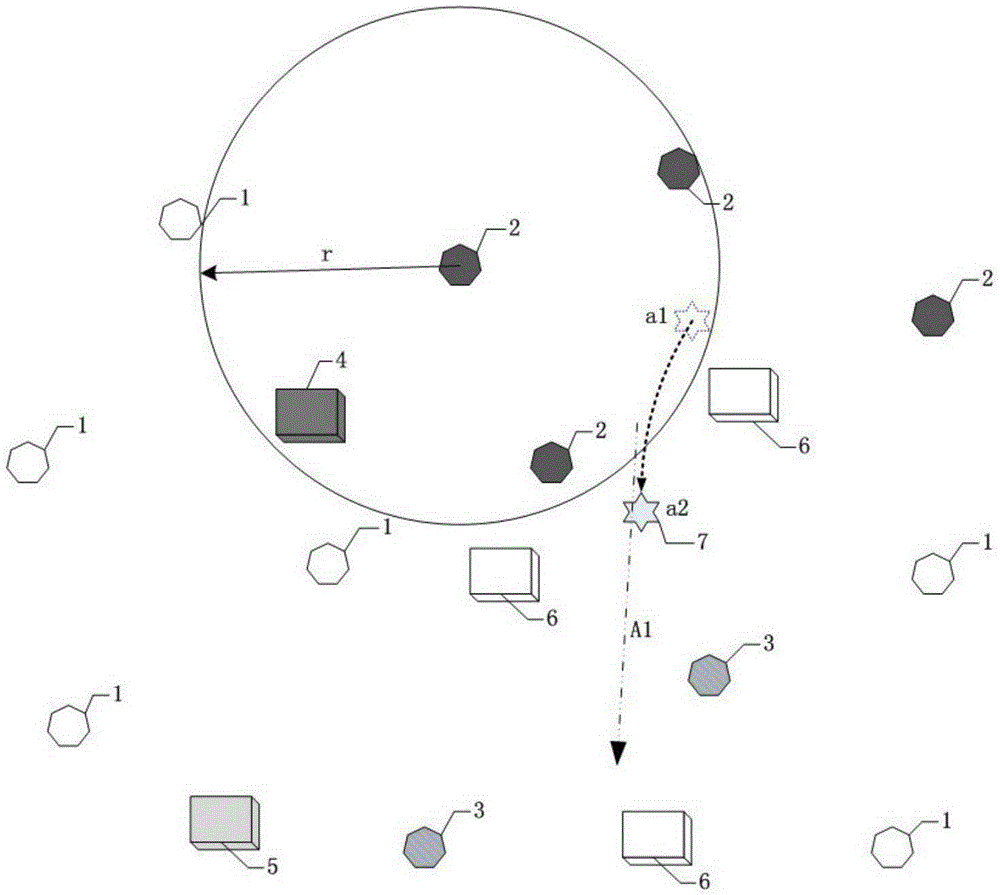
[0079] Combining the above predicted trajectory with the sensing area of the sensor, determine the sensor node that needs to be activated in the next step. At the same time, considering the influence of underwater acoustic delay, the cycle duty cycle δ of each sensor node is set as follows
[0080] δ=(0.67·10 -3 r 0 ) / τ
[0081] In the formula, 0.67 is the underwater sound propagation delay coefficient, r 0 is the sensing radius.
[0082] From the above settings, it can be seen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More