

Pipeline inspection robot
A pipeline inspection and robot technology, applied in the field of robots, can solve problems such as the inability to adapt to large-scale changes in pipe diameter, the limited range of spring adjustment, and the inability to adapt to large-scale changes in pipe diameters.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
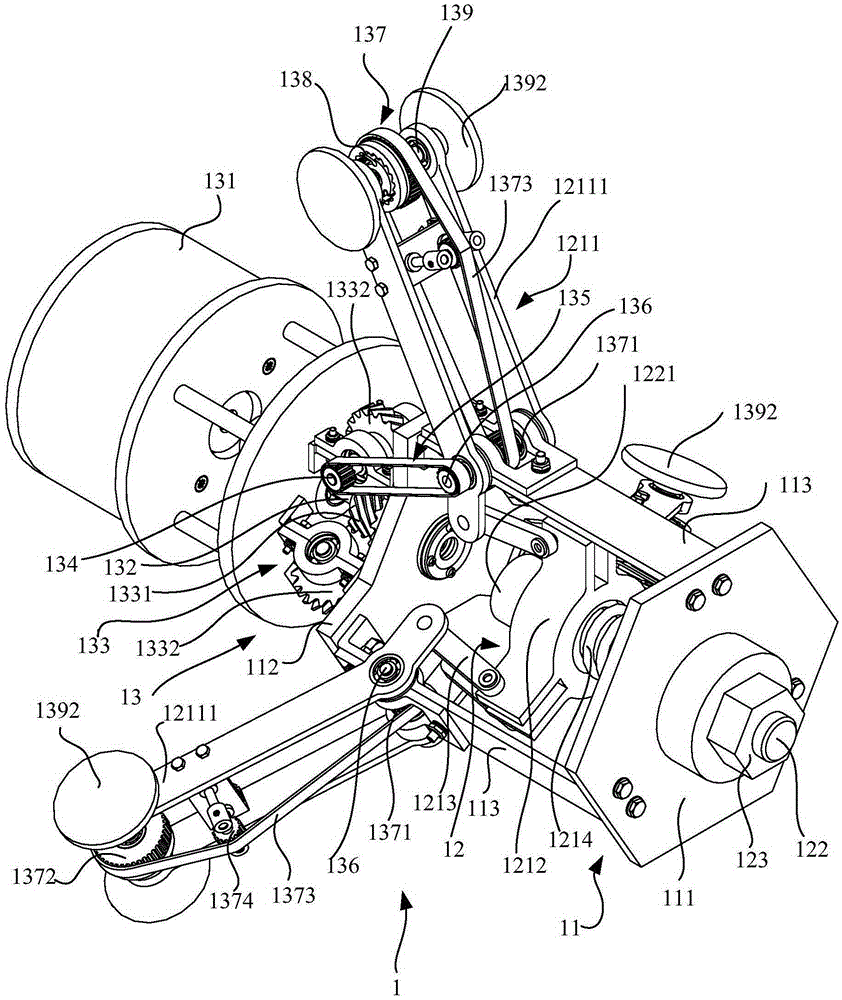
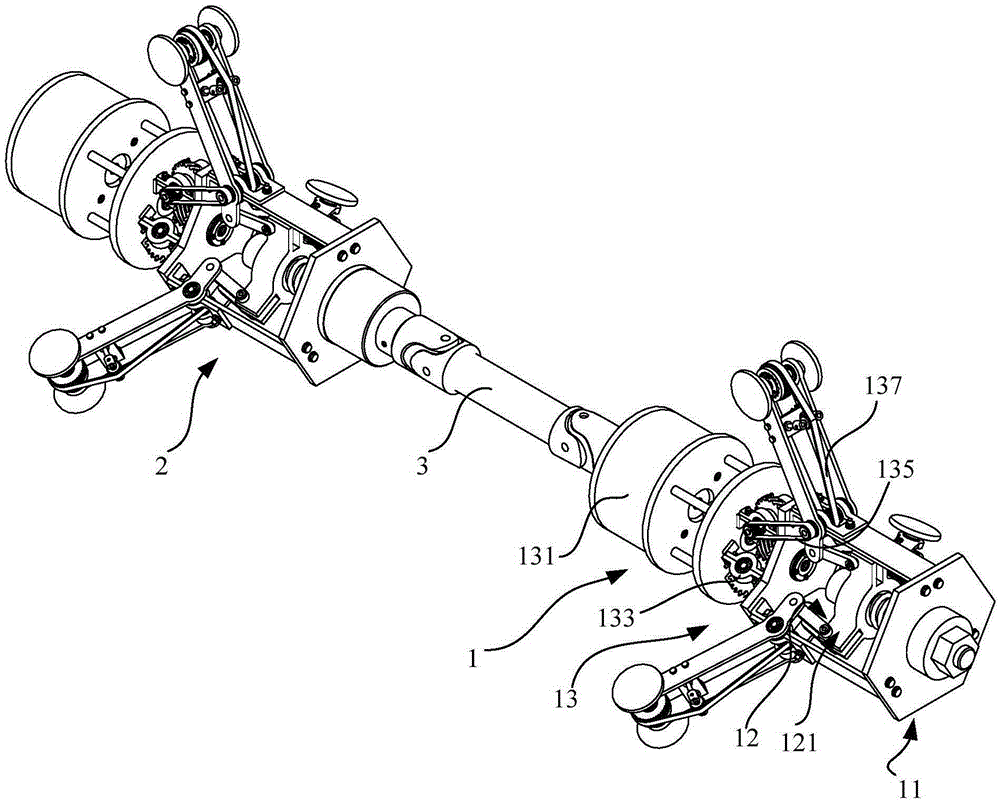
[0029] Such as figure 1 As shown, a pipeline inspection robot includes a first body 1. The first body 1 includes a frame 11 and an adjustment mechanism 12 and a transmission system mounted on the frame 11, and the transmission system 13 is used to transmit power to the adjustment mechanism 12 The adjustment mechanism 12 includes at least three groups of four-bar mechanisms 121 rotationally symmetrical about the central axis of the frame 11. The four-bar mechanism 121 is a rocker 1211 and a slider 1212 mechanism, including a rocker 1211 and a slider 1212 mounted on the frame 11 The fixed point of the rocker 1211 on the frame 11 is located at the middle of the two ends of the rocker 1211. The rocker 1211 and the slider 1212 are connected by the connecting rod 1213. The end of the rocker 1211 away from the connecting rod 1213 is attached to the inner wall of the pipe. The rod 1211 swings with the change of the inner diameter of the pipe. The four-bar mechanism 121 overcomes the pro...
Embodiment 2
[0044] The pipeline inspection machine in this embodiment is basically the same in structure as in embodiment 1, including a first body 1, which includes a frame 11 and an adjustment mechanism 12 and a transmission system 13 mounted on the frame 11. The transmission system 13 is used to transmit power to the adjustment mechanism 12. The adjustment mechanism 12 includes at least three groups of four-bar mechanisms 121 rotationally symmetrical about the central axis of the frame 11. The four-bar mechanism 121 is a rocker 1211 and a sliding block 1212 mechanism, including a mechanism installed on the frame The rocker 1211 and the slider 1212 on the 11, the fixed point of the rocker 1211 on the frame 11 is located in the middle of the two ends of the rocker 1211, the rocker 1211 and the slider 1212 are connected by the connecting rod 1213, the rocker 1211 is far away from the connecting rod 1213 One end of the rod is attached to the inner wall of the pipe, and the rocker 1211 swings...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More