

Remote operating robot fixed time control method based on rapid terminal sliding mode
A teleoperated robot, terminal sliding mode technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the system uncertainty, the initial state of the system is not easy to obtain, and the calculation of the convergence time depends on the initial system of the system. status, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0080] Embodiments of the present invention will be further described in detail below in conjunction with the accompanying drawings and examples. The following examples are used to illustrate the present invention, but should not be used to limit the scope of the present invention.
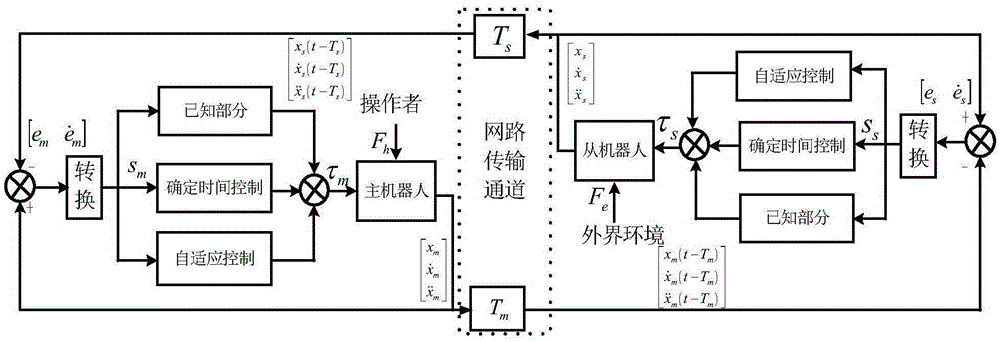
[0081] Such as Figure 1-2 As shown, the fixed-time control method of the teleoperated robot based on the fast terminal sliding mode of this embodiment includes the following steps:
[0082] S1. Select the main robot and the slave robot to form the teleoperation system, and measure the system parameters of the master robot and the slave robot respectively;
[0083] The system parameters include: the length and mass information of the rod, and the inertia matrix, Coriolis force, centrifugal force matrix, Jacobian matrix and gravity term of the master robot and the slave robot calculated according to the length and mass information of the rod;
[0084] The calculations of the inertia matrix, Corio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More