Three-dimensional gesture estimation method and three-dimensional gesture estimation system based on depth data
A technology of depth data and attitude estimation, which is applied in the field of robot vision and can solve problems such as misdetection and hand attitude estimation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0100] Describe technical scheme of the present invention in further detail below in conjunction with accompanying drawing:,
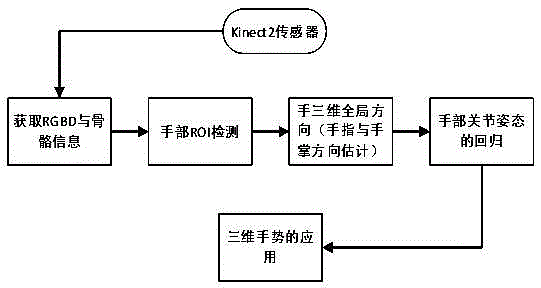
[0101] Such as figure 1 Shown, a 3D gesture estimation method based on depth data, it includes the following steps:
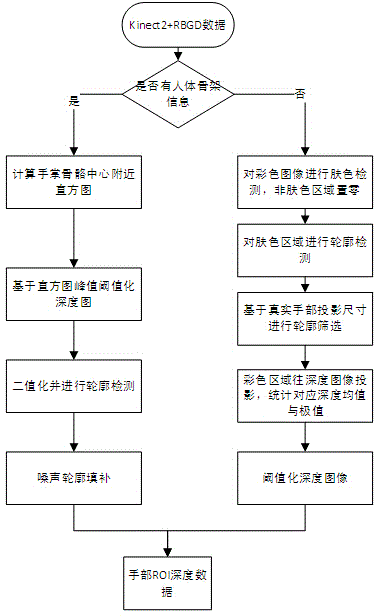
[0102] In this embodiment, the image acquisition device adopts Kinect2, and the Kinect2 sensor has the function of estimating the joint points of the human body, but it does not realize the joint points of the hand, and only a small amount of 2 points are given to represent the joints of the hand, while Kinect2 It can obtain human skeleton information more accurately in complex environments, so hand ROI data acquisition based on a single bone point in the palm is proposed. In addition, Kinect2 may not be able to obtain bone information due to the distance, posture, etc. of the person. Therefore, a hand ROI acquisition based on skin color detection is proposed for this situation. Calculation process such as figure 2 shown.
[0103] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More