

Fuzzy pid controller and control method
A technology of fuzzy control algorithm and control method, applied in the direction of electric controller, controller with specific characteristics, etc., can solve the problems of unsatisfactory control effect, affecting automation control efficiency, large control error, etc., to improve efficiency and control effect. , the effect of shortening the stabilization period and reducing the overshoot problem
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
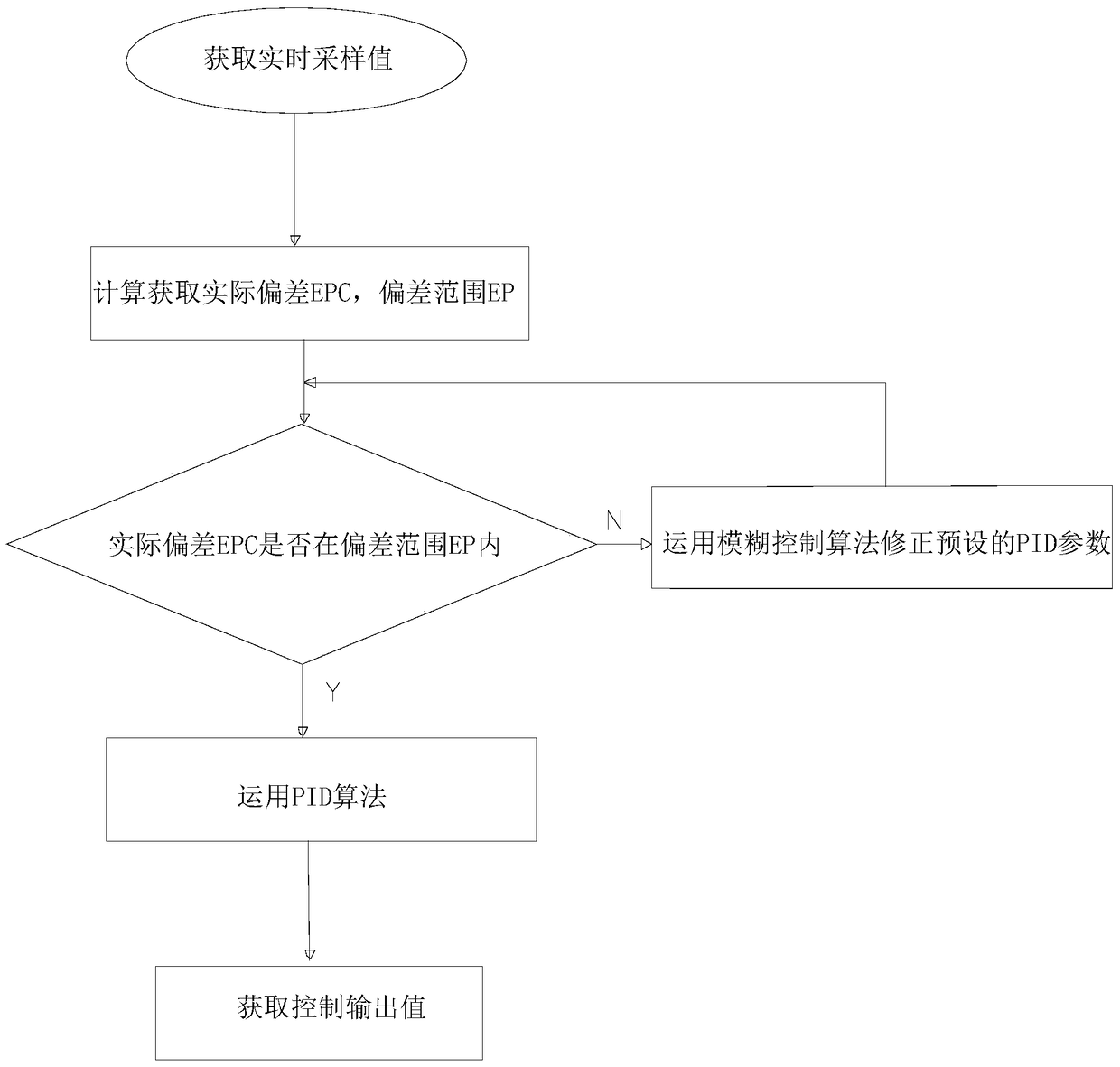
[0073] Please refer to figure 1 , the present embodiment provides a fuzzy PID control method, which may include:
[0074] S1: preset set value SV, and PID parameters including proportional gain P, integral time I and differential time D;
[0075] S2: Real-time collection of industrial signals of controlled equipment on the industrial site through sensors to obtain real-time sampling values;
[0076] S3: Calculate and obtain the actual deviation EPC according to the real-time sampling value and the set value SV, and obtain the deviation range EP according to the preset proportional gain P;
[0077] S4: Judging whether the actual deviation EPC falls outside the deviation range EP; obtaining the judgment result;
[0078] If the judgment result is that the actual deviation EPC is outside the deviation range EP, execute S41;
[0079] If the judgment result that the actual deviation EPC is within the deviation range EP, execute S42;
[0080] S41: first use the fuzzy control algo...
Embodiment 2
[0087] This embodiment is an extension of the solution of Embodiment 1, and the same content will not be repeated. The difference is that it also includes the process of preprocessing the real-time sampling values collected in real time in S2, specifically including:
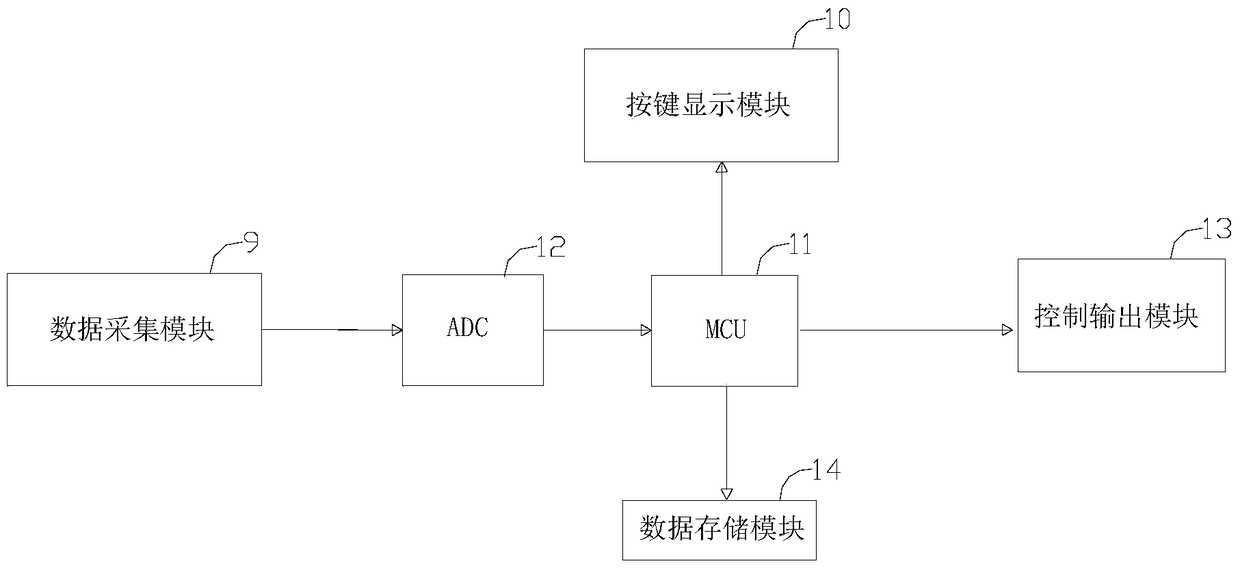
[0088] S21: Sequentially perform gating, filtering and op-amp processing on the real-time sampling value, and then transmit it to the digital-to-analog conversion module, convert the simulated real-time sampling value into a real-time sampling value digital signal, and then transmit it to the microprocessor MCU11;
[0089] S22: the microprocessor MCU11 samples the real-time sampled value digital signal according to multiple time-sharing samples in a sampling period, obtains the sampled value after the average filtering, and saves the average sampled value in the data memory as an effective real-time sampled value, It is used to calculate the subsequent actual deviation EPC.
[0090] The preset parameter in the...
Embodiment 3
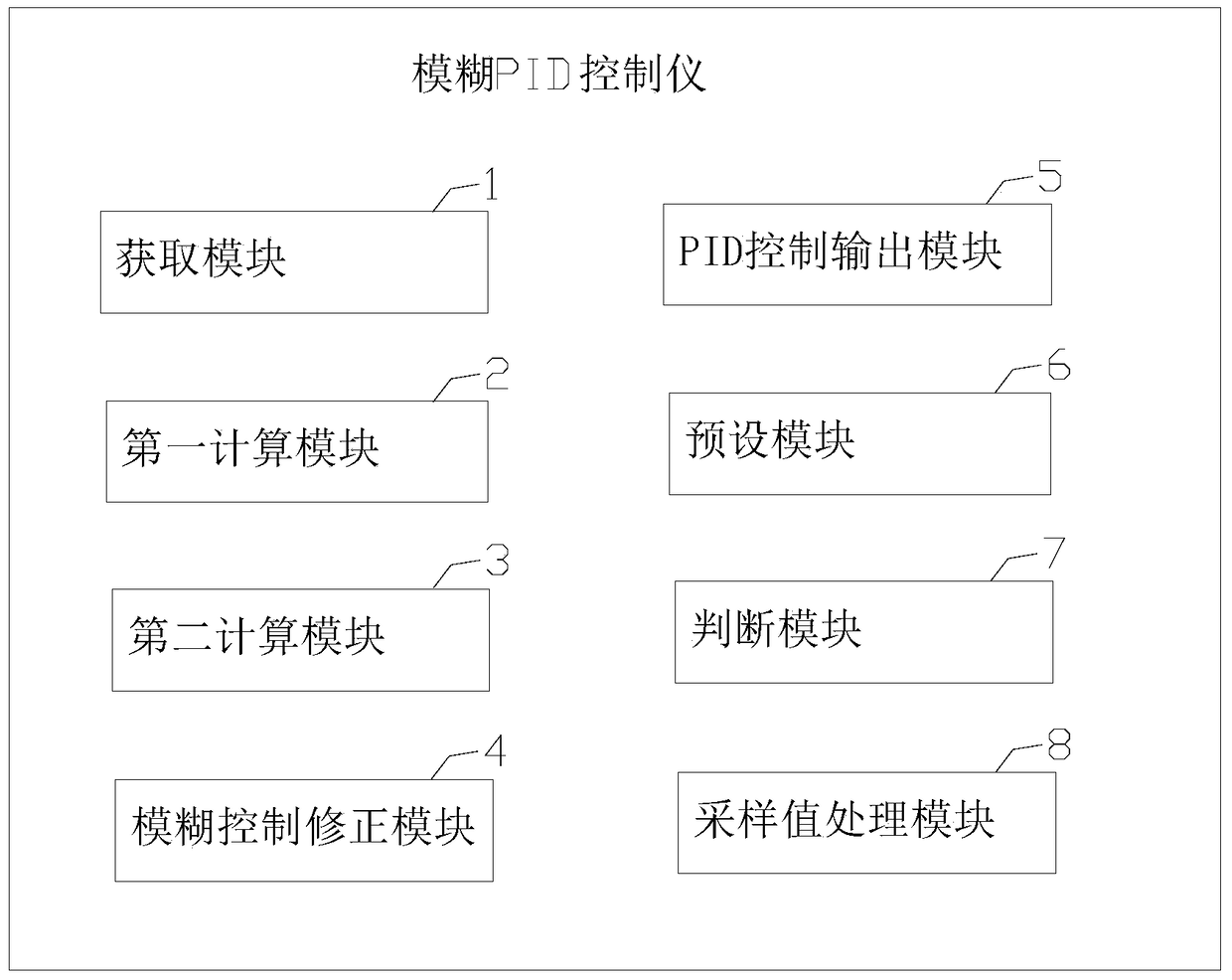
[0093] see figure 2 , providing a fuzzy PID controller, comprising:
[0094] Obtaining module 1, used to obtain real-time sampling values;
[0095] The sampled value processing module 8 is used to sequentially perform gating, filtering and op-amp processing on the real-time sampled value, and then convert it into a real-time sampled value digital signal;
[0096] The time-sharing sampling module is used to sample the real-time sampled value digital signal multiple times in a sampling period to obtain an average sampled value, and then use the average sampled value as an effective real-time sampled value to calculate the actual deviation EPC .
[0097] The preset module 6 is used to preset the set value and PID parameters including proportional gain P, integral time I and differential time D;
[0098] The first calculation module 2 is used to calculate and obtain the actual deviation EPC according to the real-time sampling value and the set value;
[0099] The second calcu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More