

Specified performance parameter estimation-based self-adaptive control method
A technology of adaptive control and parameter estimation, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as unfavorable controller design, unknown system physical parameters, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
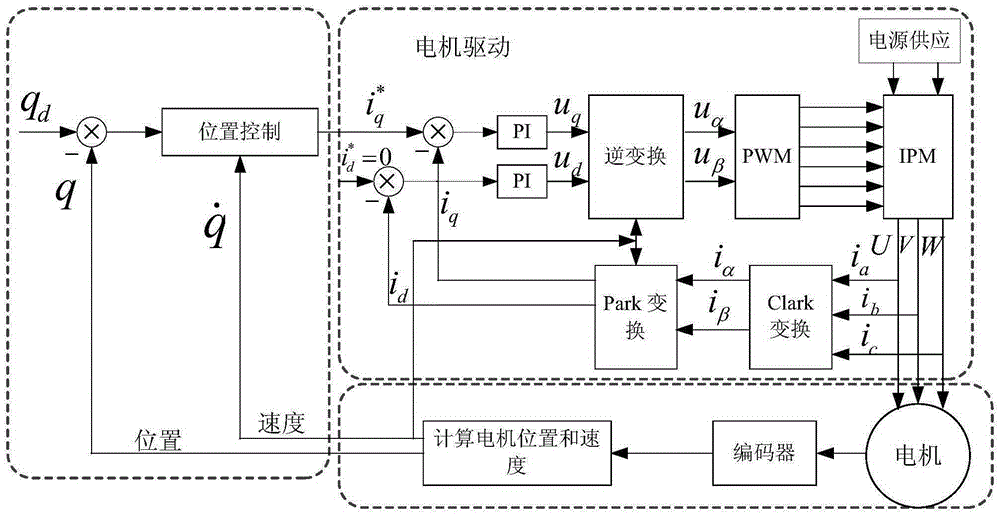
[0087] In order to verify the feasibility of the method, select the figure 1 The motor servo system shown is described, and the parameter of the selected motor servo system is J=0.1kg / m 2 , K E =0.2,K T =5N·m / A, R a = 5Ω, T l =0.1N·m, T f = α 2 tanh ( 15 q · ) + α 3 q · , α 2 = 0.07 , α 3 = 0.08. The specified performance function is defined as: μ(t)=(0.15-0.03)e -0.4t +0.03. The high-order neural network activation function is defined as: σ(x)=0.5 / (1+e -1x )+0.1, L=8.
[0088] Such as Figure 10 As shown, an adaptive control method based on the estimation of specified performance p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More