Rapid flexible mechanical beam end positioning algorithm for point-to-point small displacement translation
A positioning algorithm, a technology of mechanical beams, applied in servo motor control, digital control, program control systems, etc., can solve problems such as inability to implement, interference with precision positioning systems, and limited compensation range, and achieve simple implementation, system cost reduction, and operation. Easy and reliable results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] In order to enable those skilled in the art to better understand the technical solution of the present invention, the present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments. And the features in the embodiments can be combined with each other.
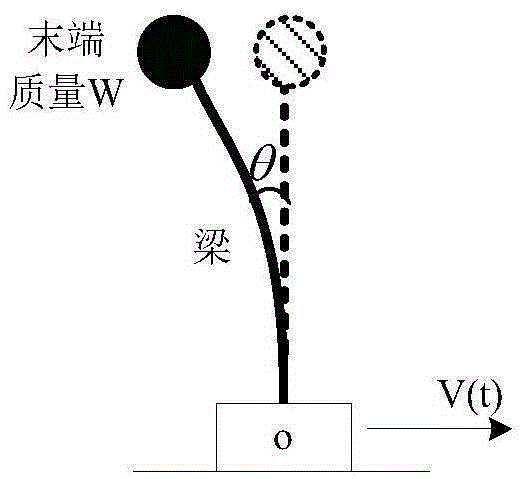
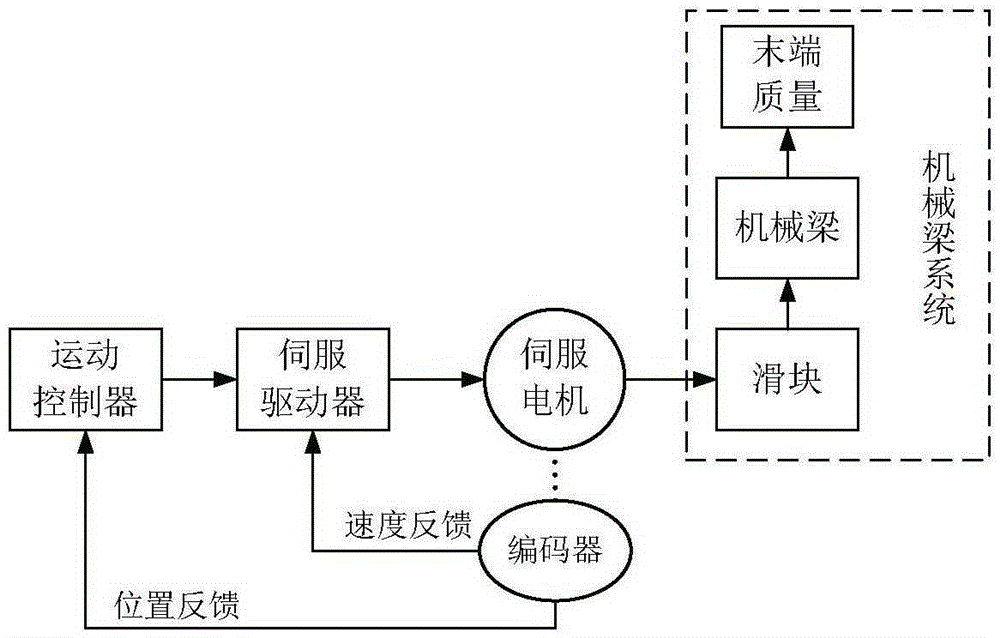
[0032] Such as figure 1 As shown, in the translational flexible mechanical beam system applied in the present invention, the slider O moves left and right along the horizontal plane, one end of the mechanical beam is fixed on the slider, and the other end is seamlessly connected to a mass body. When the slider moves in a fast point-to-point small displacement along the horizontal direction, the beam with the end mass also moves along the horizontal direction and vibrates relative to the slider. The power source of the whole system is the servo motor, which controls the quality of the target point at the end of the mechanical beam. Such as figure 2 As ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



