

Wrist of robot and surgical robot
A robot and wrist technology, applied in the field of robot wrists and surgical robots, can solve problems such as difficult control, low control precision of wrist joints, and small rotation range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
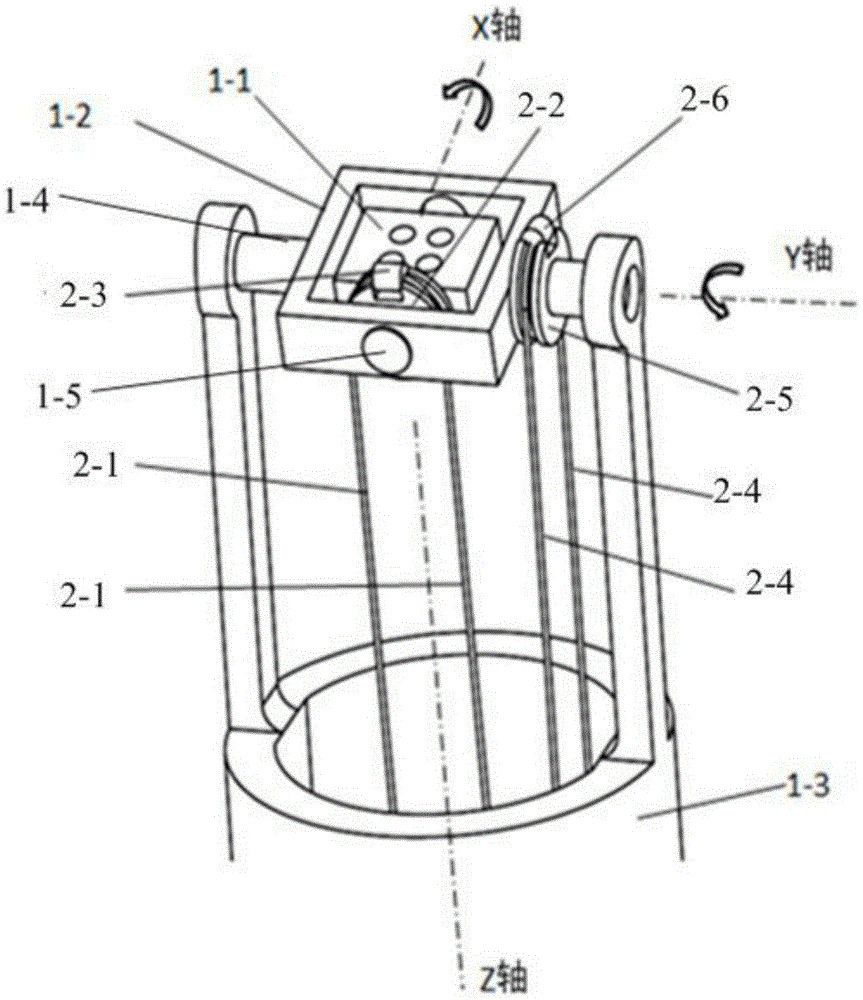
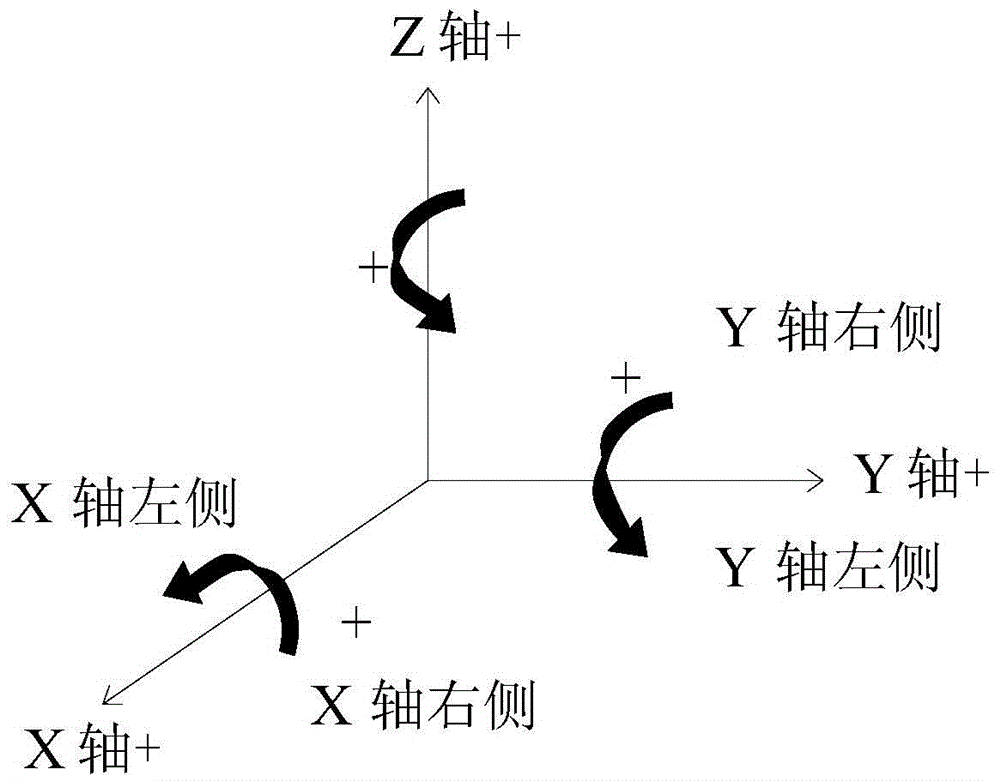
[0070] figure 1 It is a schematic diagram of the robot wrist in Embodiment 1 of the present invention, figure 2 for figure 1 The coordinate system of the robot wrist is shown.
[0071] refer to Figure 1~2, a robot wrist, comprising an inner rotating frame 1-1, an outer rotating frame 1-2, a base 1-3, a first rotating shaft 1-4 and a second rotating shaft 1-5, wherein the inner rotating frame 1- 1 is located inside the outer rotating frame 1-2, the outer rotating frame 1-2 is fixed on the first rotating shaft 1-4, and the two ends of the first rotating shaft 1-4 are respectively rotatably mounted on the base 1- 3, and the outer rotating frame 1-2 can rotate together with the first rotating shaft 1-4, while the inner rotating frame 1-1 is fixed on the second rotating shaft 1-5, the second rotating shaft The two ends of 1-5 are respectively rotatably installed in the shaft holes of the outer swivel frame 1-2, and the inner swivel frame 1-1 can rotate together with the secon...
Embodiment 2
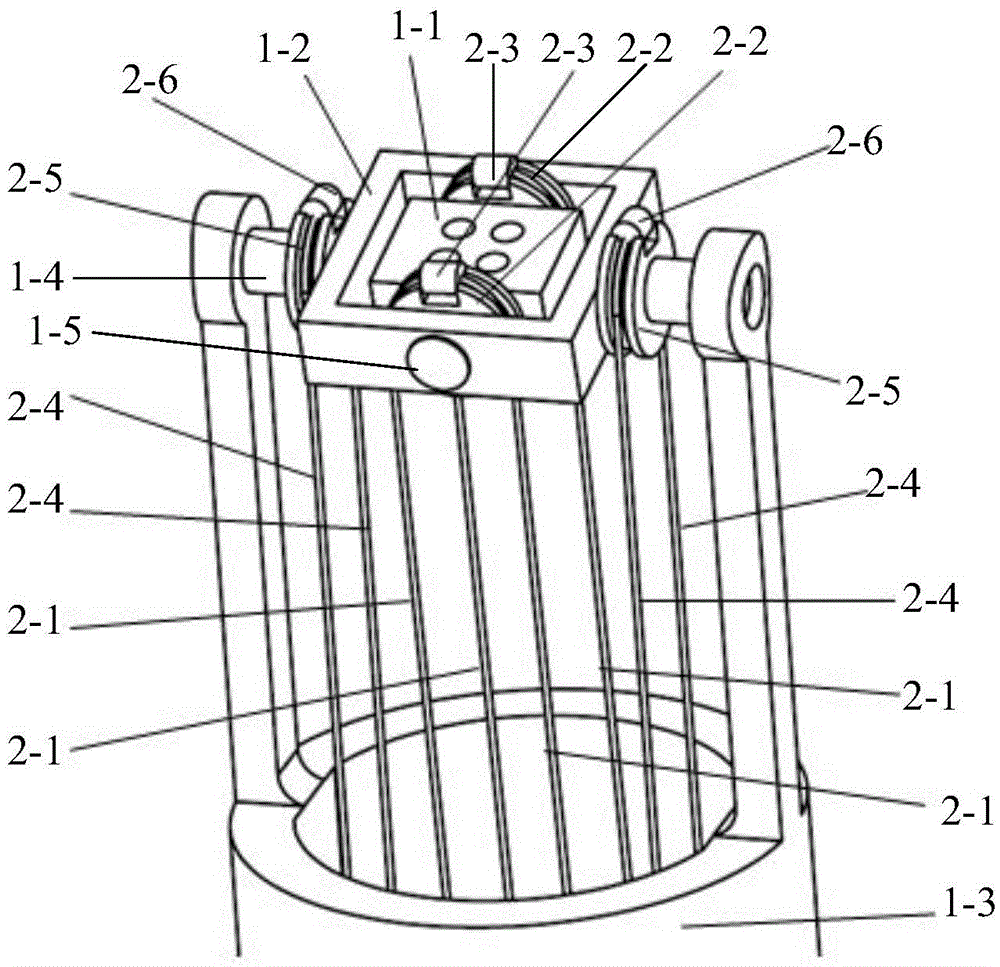
[0092] The difference between the second embodiment and the first embodiment is that the number of the first driving wheel 2-2 and the second driving wheel 2-5 are respectively increased from one to two, and the two first driving wheels 2-2 are sleeved It is fixedly connected with the inner rotating frame 1-1 on the second rotating shaft 1-5, and two first driving wheels 2-2 are arranged symmetrically on the left and right sides of the inner rotating frame 1-1 (ie, the Y axis). Similarly, the two second driving wheels 2-5 are sleeved on the first rotating shaft 1-4 and fixedly connected with the outer rotating frame 1-2, and the two second driving wheels 2-5 are symmetrically arranged on the outer rotating frame 1-2. 2 (that is, the left and right sides of the X-axis), see for details image 3 .
[0093] Such as image 3 As shown, the first transmission mechanism includes two first driving ropes 2-1 and two first driving wheels 2-2, and the two first driving wheels 2-2 are bot...
Embodiment 3
[0099] The difference between the third embodiment and the first embodiment is that the first driving rope 2-1 and the first driving wheel 2-2 are replaced by two driving ropes, and the two driving ropes are respectively arranged at the ends of the second rotating shaft 1-5. left and right, to drive the inner rotating frame 1-1 to rotate positively or reversely around the X axis through the two driving ropes, see for details Figure 4 .
[0100] Such as Figure 4 As shown, the first transmission mechanism includes a third driving rope 2-7 and a fourth driving rope 2-8, and one end of the third driving rope 2-7 is fixed on the inner rotating frame 1-1 And arranged on the left side of the X-axis, the other end of the third driving rope 2-7 passes through the through hole in the central part of the base 1-3 and is connected to a motor; correspondingly, the fourth driving rope 2-8 One end of which is fixed on the inner rotating frame 1-1 and is arranged on the right side of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More