

Miniature unmanned plane RTK relative positioning method based on difference air pressure height constraints
A technology of small unmanned aerial vehicle and air pressure altitude, which is applied in the field of satellite navigation and positioning, and can solve the problems of not being able to equip measuring receivers, reducing the success rate of ambiguity in the whole circle, and being unable to effectively guarantee RTK positioning accuracy, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
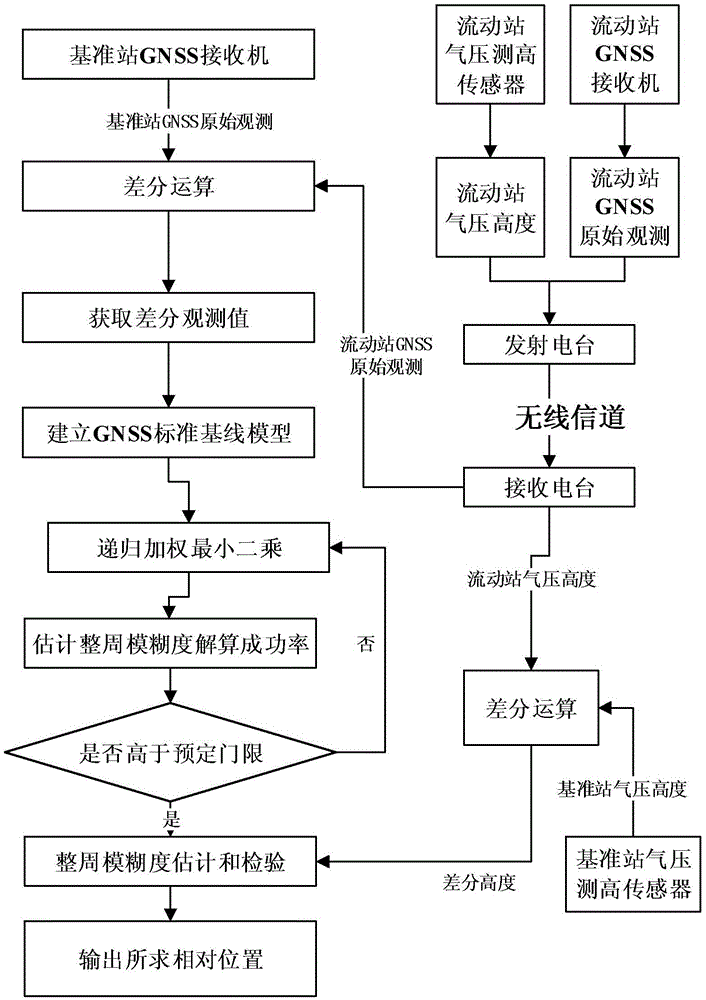
[0036] Such as figure 1 As shown, the real-time dynamic relative positioning method based on the differential pressure altitude constraint provided by the present invention includes the following steps carried out in order:
[0037] 1) Install the GNSS receiver, GNSS antenna, barometric altimeter sensor and receiving station on the base station, wherein the GNSS antenna and the barometric altimeter sensor are at the same height, use the GNSS receiver and GNSS antenna to obtain the original GNSS observation value of the base station, and at the same time Measuring the Barometric Altitude H of the Reference Station Using the Barometric Altimeter Sensor base , the height measurement accuracy is σ H ;
[0038] 2) GNSS receiver, GNSS antenna, barometric altimetry sensor and transmitting station of the same model as described in step 1) are installed on the mobile station, that is, a small unmanned aerial vehicle, wherein the GNSS antenna and barometric altimeter are at the same h...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More