

Manipulator driven by pneumatic brake cables and having human hand characteristics
A manipulator and line-driven technology, which is applied in the field of manipulators, can solve the problems of stiff and bulky manipulator movements, failure to meet application requirements, and single clamping method, and achieve the effect of novel structure, simple structure and fast response
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
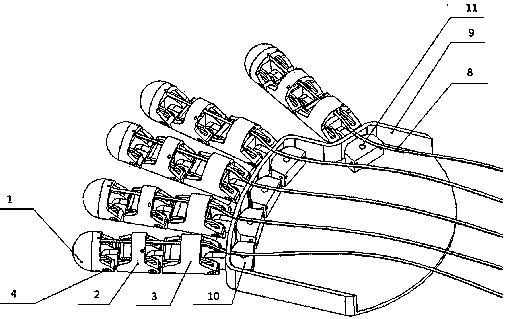
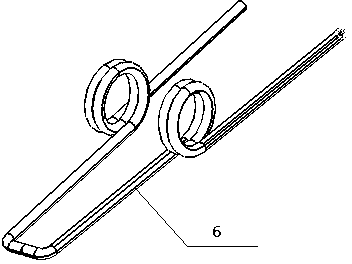
[0040] The connection pin 4 and the rolling bearing 5 are nested and matched between each mechanical finger of the present invention, and the torsion spring 6 realizes the reset after bending. The upper knuckles 1 of the five manipulators all have fixing holes for the brake wires 8, and the brake wires 8 pass through the limit holes of the brake wires 8 of the middle knuckles 2 of the manipulator and the lower knuckles 3 of the manipulators respectively, thereby connecting the power chain. Brake wire 8 is fixed in the fixing hole of brake wire 8 of knuckle 1 on the manipulator, and then connects cylinder 19 to drive after manipulator palm 9; Forced at the fixed place of brake wire 8 with connecting pin 4 as the rotating shaft, knuckle on the manipulator 1 and knuckle 2 in the manipulator are bent simultaneously to achieve the purpose of bending fingers. Cylinder 19 is connected with gate line 8 by fixed limit block 14, carries out transmission, and cylinder 19 is fixed with fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More