

Under-actuated UUV (unmanned underwater vehicle) depth control method based on artificial bee colony optimized model predication
An artificial bee colony optimization and depth control technology, which is applied in height or depth control, non-electric variable control, vehicle position/route/height control, etc., to achieve the effect of reducing cumulative effect, reducing external disturbance and system structural parameter changes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0031] Specific embodiment one: a kind of underactuated UUV depth control method based on artificial bee colony optimization model prediction of this embodiment is specifically prepared according to the following steps:
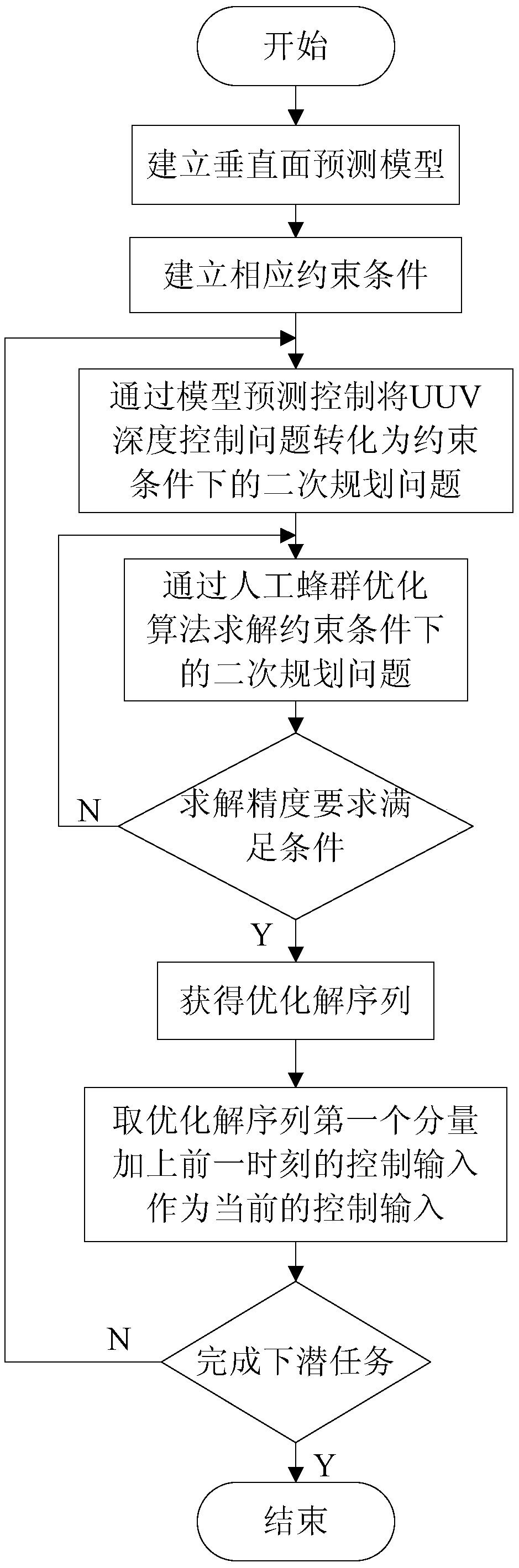
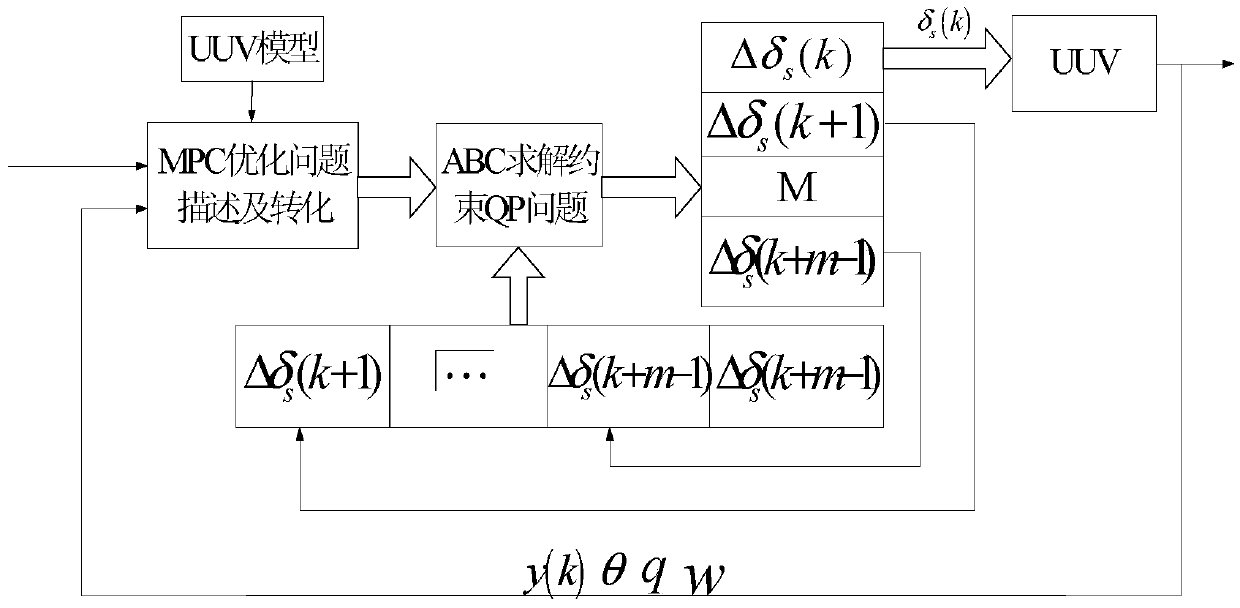
[0032] attached figure 2 And attached image 3 The flow chart and control block diagram of the underactuated UUV depth control based on artificial bee colony optimization model prediction are given respectively;
[0033] Step 1. Organize the UUV vertical plane model into a state space model, and discretize the state space model to obtain an underactuated UUV incremental vertical plane prediction model;
[0034] Step 2, at time k, set up the control input constraints of the horizontal rudder angle according to the horizontal rudder characteristics; the control input constraints of the horizontal rudder angle include amplitude constraints and the incremental constraints of each beat action; and the horizontal rudder angle The control input constraints are un...
specific Embodiment approach 2
[0052] Embodiment 2: The difference between this embodiment and Embodiment 1 is that in step 1, the UUV vertical plane model is sorted into a state space model, and the state space model is discretized to obtain an underactuated UUV incremental vertical plane prediction model. The process is:
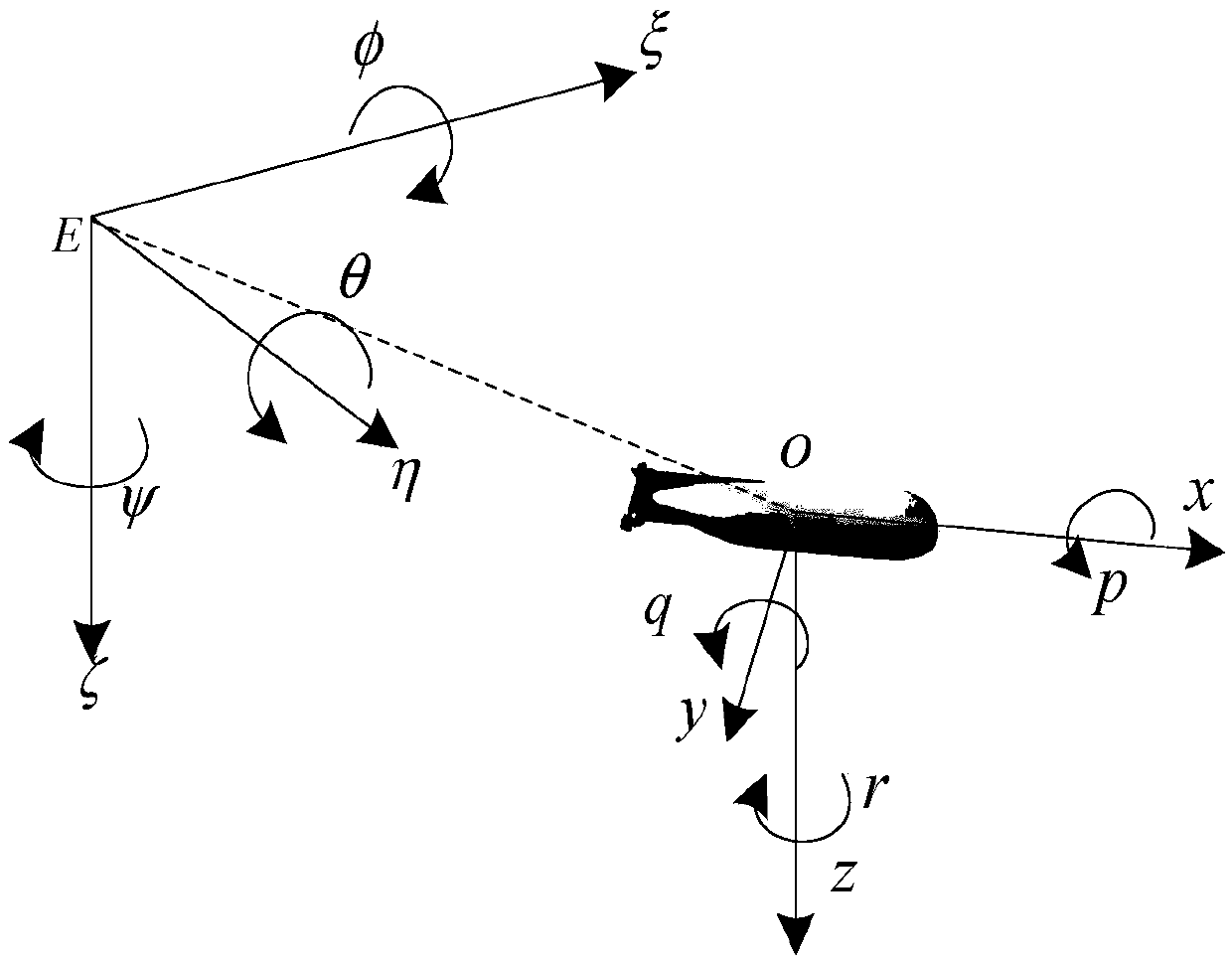
[0053] Step one, combine figure 1 , the coordinate system of UUV is established, wherein, the coordinate system of UUV includes fixed coordinate system E-ξηζ and moving coordinate system O-XYZ;
[0054] Step 12, get the state variable The rudder angle δ of the horizontal rudder s (t) and UUV dive depth y(t) at time t to establish the state space equation of the UUV vertical plane, that is, the continuous state space model:
[0055] x · ( t ) = A ...
specific Embodiment approach 3
[0104] Specific implementation mode three: the difference between this implementation mode and specific implementation mode one or two is: T in step one or three s is 0.5s. Other steps and parameters are the same as those in Embodiment 1 or Embodiment 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More