

Method for using laser radar scanning method to calibrate dynamic pedestrians and vehicles in video in snowing or raining state
A technology in lidar and video, applied in image data processing, instrument, character and pattern recognition, etc., can solve the problems of inaccurate recognition of dynamic objects and poor real-time performance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
[0071] Specific implementation mode 1, refer to Figure 1 to Figure 7 This embodiment is described in detail. The method described in this embodiment uses the laser radar scanning method to calibrate the dynamic pedestrians and vehicles in the video under the rain and snow state. The pre-processing of the image before rain and snow removal;
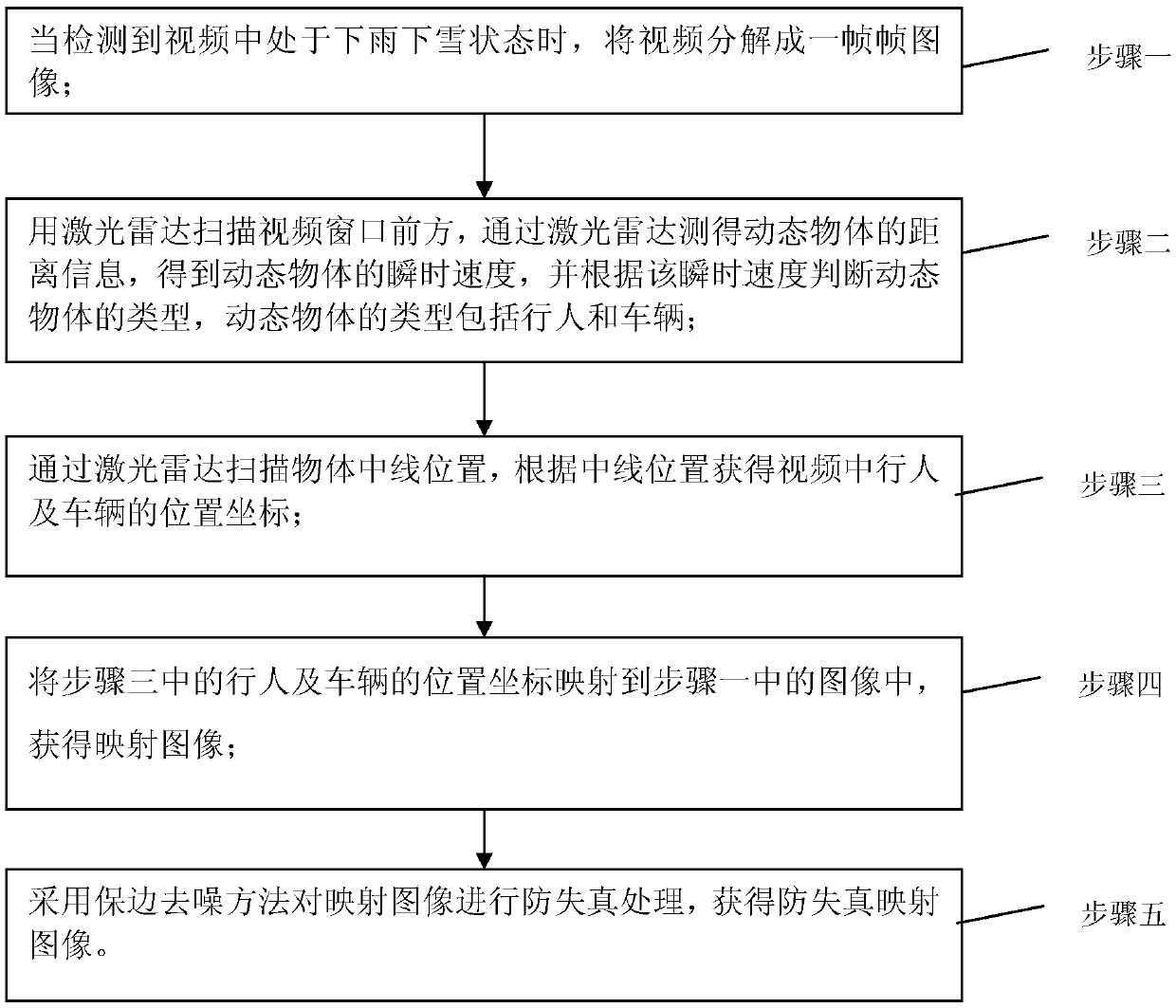
[0072] The method comprises the steps of:
[0073] Step 1. When it is detected that the video is in a rainy or snowy state, the video is decomposed into frame-by-frame images;
[0074] Step 2. Scan the front of the video window with laser radar, measure the distance information of the dynamic object through the laser radar, obtain the instantaneous speed of the dynamic object, and judge the type of the dynamic object according to the instantaneous speed. The types of dynamic objects include pedestrians and vehicles;
[0075] Step 3. Scan the centerline position of the object through the laser radar, and obtain the position coordinates o...
specific Embodiment approach 2
[0080] Specific Embodiment 2. This embodiment is a further description of the method of using the laser radar scanning method to calibrate the dynamic pedestrians and vehicles in the video in the rain and snow state described in the first embodiment. In this embodiment,
[0081] In step 2, the laser radar is used to scan the front of the video window, and the distance information of the dynamic object measured by the laser radar is used to obtain the instantaneous speed of the dynamic object, and the type of the dynamic object is judged according to the instantaneous speed. The types of dynamic objects include pedestrians and vehicles. The specific process is as follows:
[0082] Set the speed threshold d, where d is 3km / h~5km / h;
[0083] If V>d, the dynamic object is a vehicle;
[0084] If 0<V<d, the dynamic object is a pedestrian.
specific Embodiment approach 3
[0085] Specific Embodiment 3. This embodiment is a further description of the method described in Embodiment 1, which adopts the laser radar scanning method to calibrate the dynamic pedestrians and vehicles in the video in the rain and snow state. In this embodiment,
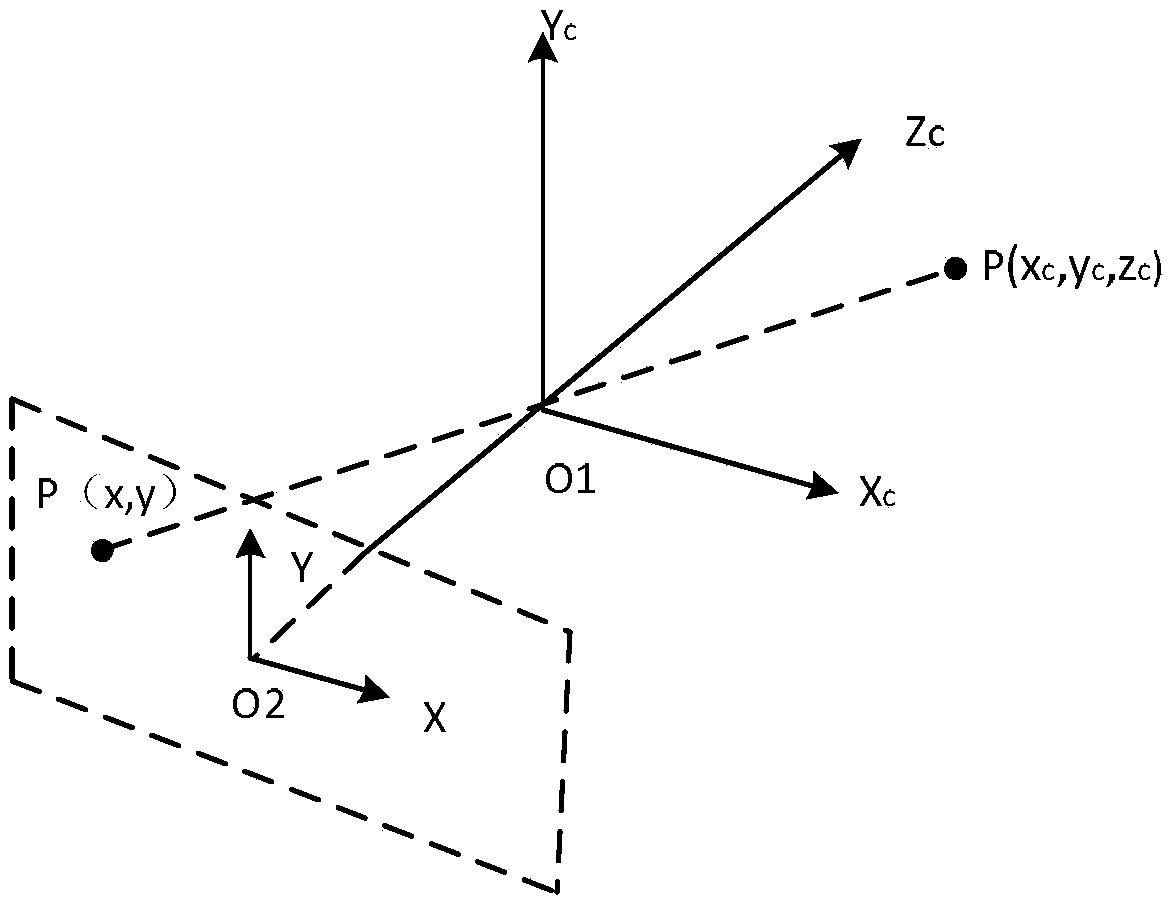
[0086] In step 3, the centerline position of the object is scanned by the laser radar, and the position coordinates of pedestrians and vehicles in the video are obtained according to the centerline position. The specific process is as follows:
[0087] Step 31. Set the scanning height H of the lidar to 0.85m-1m, and the height is at the horizontal midline of the height of pedestrians and vehicles;
[0088] Step 32: The lidar scans horizontally to obtain the two-dimensional starting coordinates (X1, H) and end point coordinates (X2, H) at the horizontal midline of the dynamic object;
[0089] Step 33, according to the centerline principle, the height of pedestrians and vehicles is 2H;
[0090] Step three and fou...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More