

Seven-shaft robot with transverse moving mechanism
A technology of lateral movement and robotics, applied in the field of seven-axis robots, which can solve the problems of narrow control range, difficult horizontal linear movement of the gripper and suction cup, and easy shaking of the manipulator.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
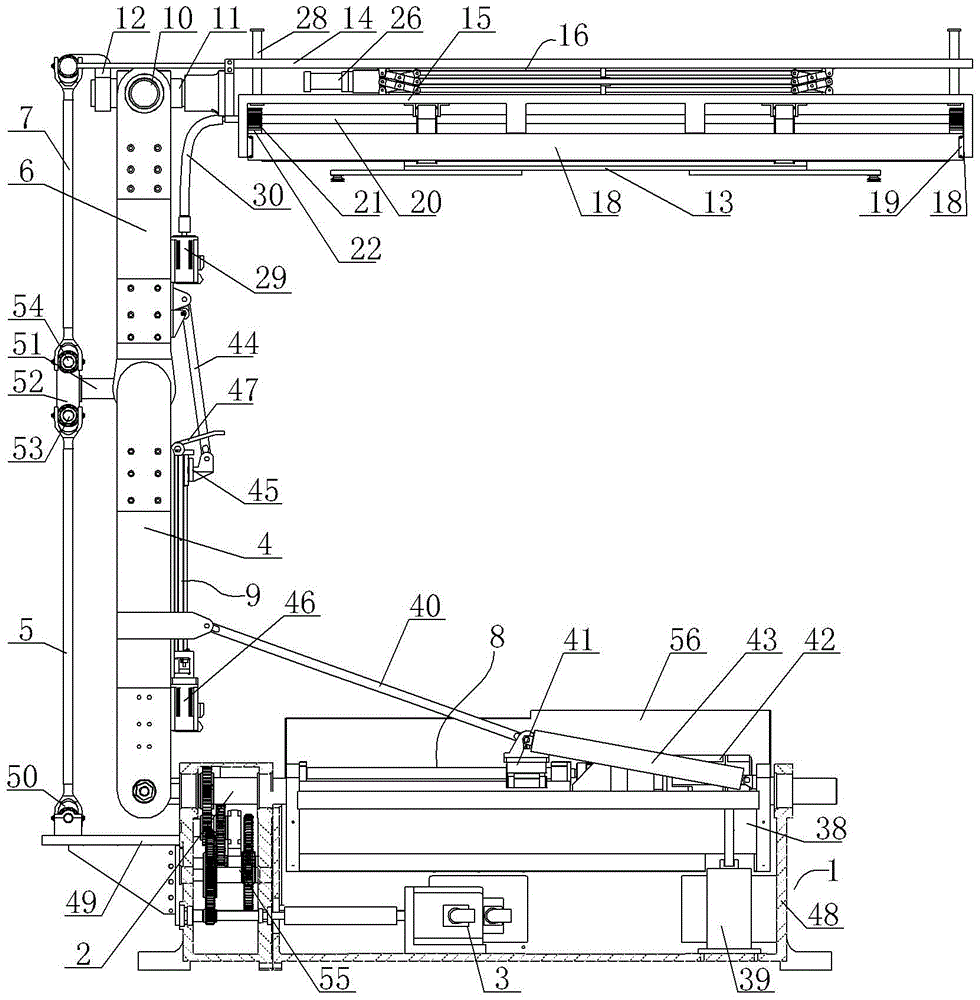
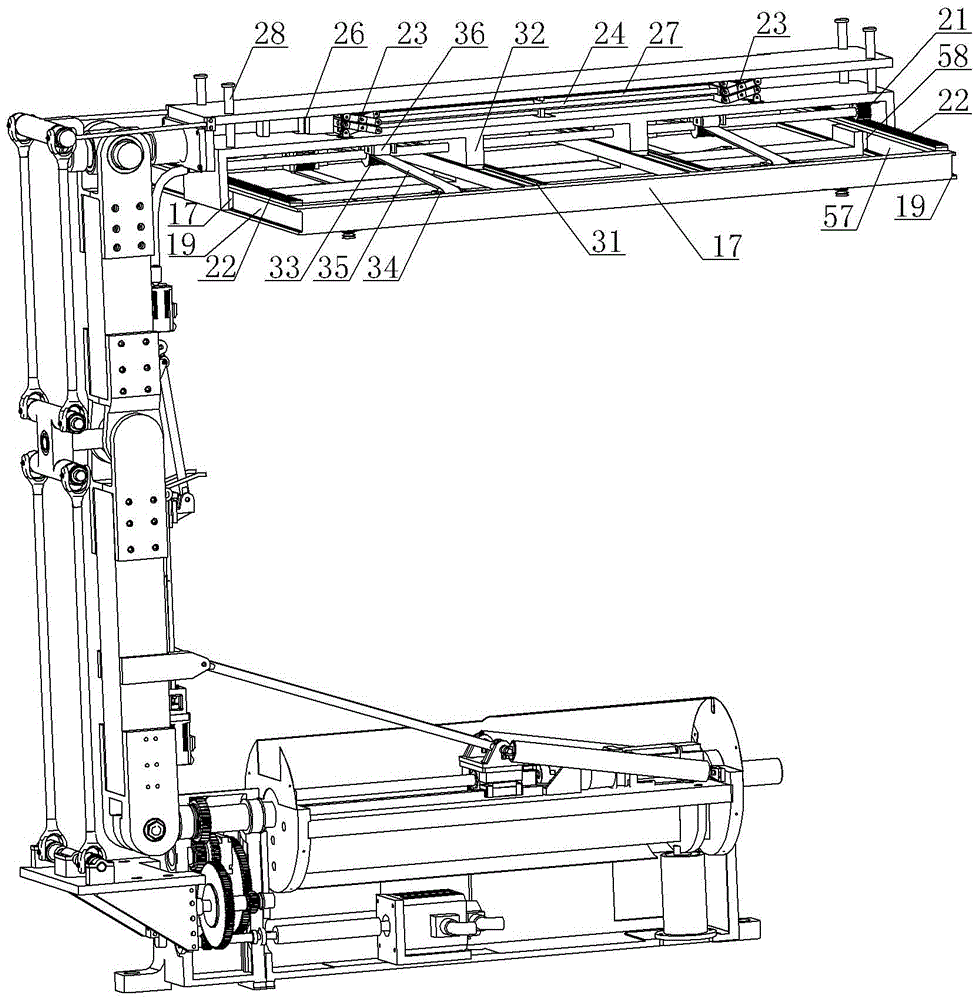
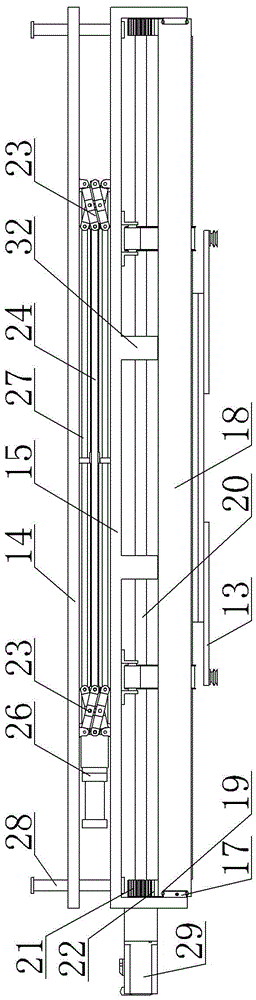
[0037] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0038] A seven-axis robot with lateral kinematics, see Figure 1 to Figure 7 : It includes a base 1, the base 1 is provided with a horizontally rotatable first shaft 2, one end of the first shaft 2 is provided with a first shaft servo motor 3 that drives the first shaft 2 to rotate, and the other end of the first shaft 2 is connected to There is a swing arm assembly, the first shaft servo motor 3 drives the first shaft 2 to rotate and then drives the swing arm assembly to swing around the first shaft 2 in the circumferential direction, the free end of the swing arm assembly is connected with a gripper for grabbing workpieces, The swing arm assembly includes a first swing arm assembly and a second swing arm assembly hinged together, the first swing arm assembly includes a second shaft 4 hinged at the end of the first shaft, one side of the second shaft 4...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More