

Bionic Climbing Robot Based on Ballista Device
A technology of robots and ballistas, which is applied in the field of bionic robots, can solve the problems that robots can only climb, and achieve the effects of saving power sources, convenient control, and fast climbing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
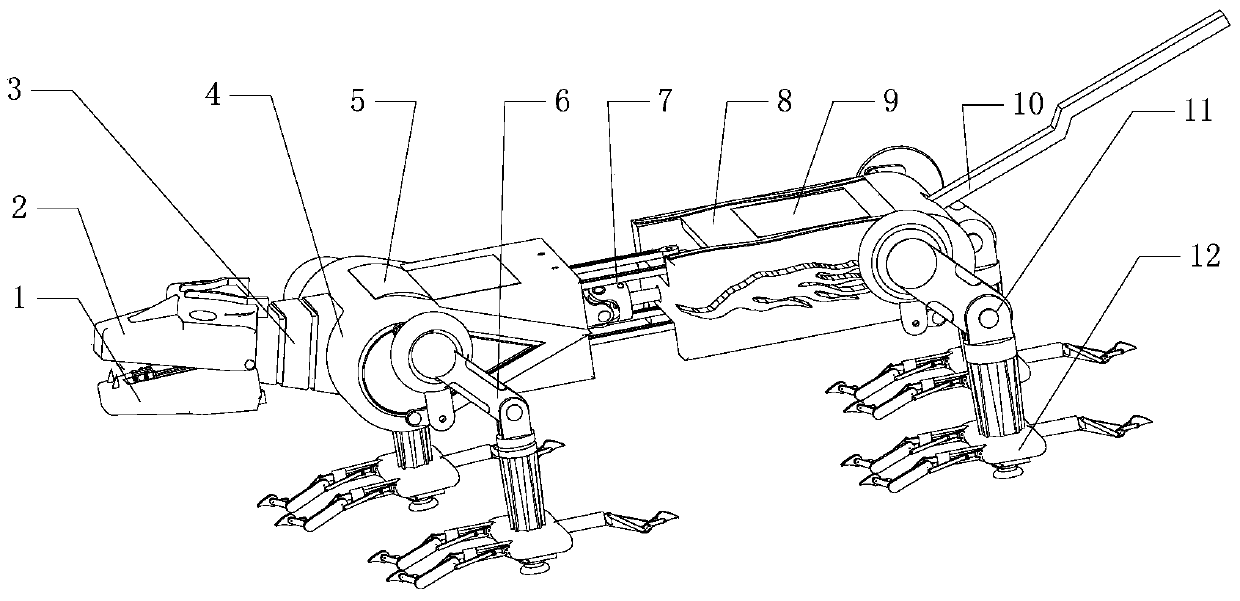
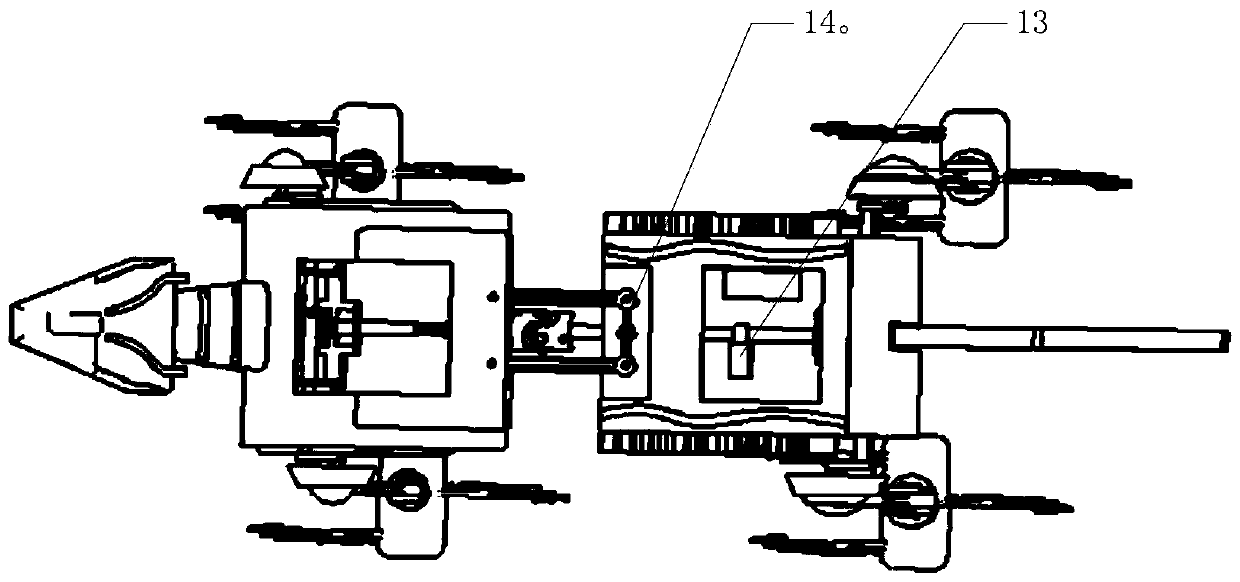
[0020] in figure 1 with figure 2 In the schematic diagram of the bionic climbing robot based on the ballista device, the head ejection device with the upper mouth 2 and the lower mouth 1 is connected to the front torso 4 of the torso steering device through the neck 3, and the front torso of the torso steering device Both the rear torso and the rear torso 8 are cavity structures, on which a front cover 5 and a rear cover 9 are respectively provided. The front torso and the rear torso are connected by a body connecting rod 7, and the two ends of the body connecting rod connecting the front and rear torso are provided Turning block 14, the limb power device is arranged in the cavity of the trunk steering device, the tail rod 10 is connected to the rear torso, the limb power device is connected to one end of the front leg 6 and the rear leg 11, and the other ends of the front and rear legs are respectively connected to the sole of the foot Climbing device connection.
[0021] At th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More