

Walking-type glass-curtain-wall cleaning robot
A technology for cleaning robots and glass curtain walls, applied in the field of robotics, can solve problems such as the inconvenience of placing robots, the trouble of cleaning sliding windows, and the inability of window robots to go over, achieving the effects of low power consumption, high flexibility, and avoiding interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be described in further detail below in conjunction with the accompanying drawings.
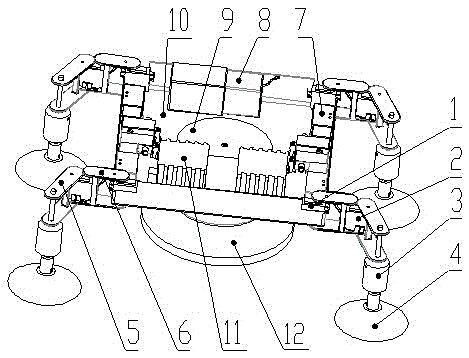
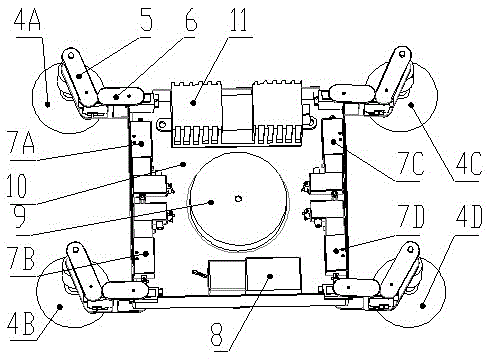
[0025] Such as figure 1 with figure 2 As shown, a walking glass curtain wall cleaning robot includes four legs, four electromagnetic reversing valves 7, a power supply 8, a DC motor 9, a robot shell 10, a vacuum pump 11, a dust removal cloth 12 and a control system; Two legs are installed on the four corners of the robot shell 10, and four electromagnetic reversing valves 7 are fixed on the assembly boss on the bottom surface of the robot shell 10 by screws, and are next to the left and right walls of the shell wall; the power supply 8 is installed on the robot In the power ferrule of shell 10, vacuum pump 11 is fixed on the bottom surface of robot shell 10 and is close to shell wall, and described DC motor 9 is installed in the concave cylinder of robot shell 10, and the bottom of DC motor 9 is installed dust removal cloth 12.
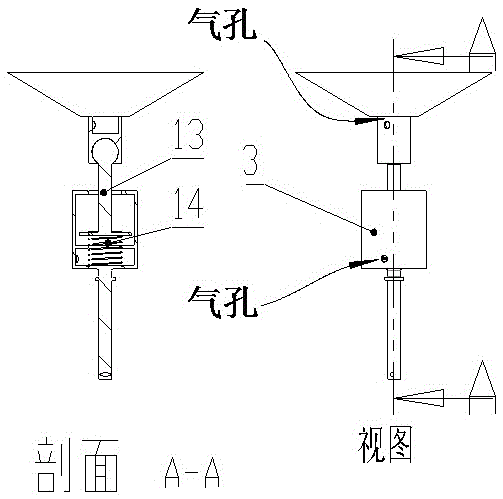
[0026] Described leg foot ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More