

Main end force feedback device and working method of robot for vascular interventional surgery
An interventional surgery, robot-based technology, applied in the field of medical equipment, can solve the problems of reducing surgical safety, large errors, damage, etc., to achieve the effect of no additional load, efficient additional load, and intuitive feedback
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
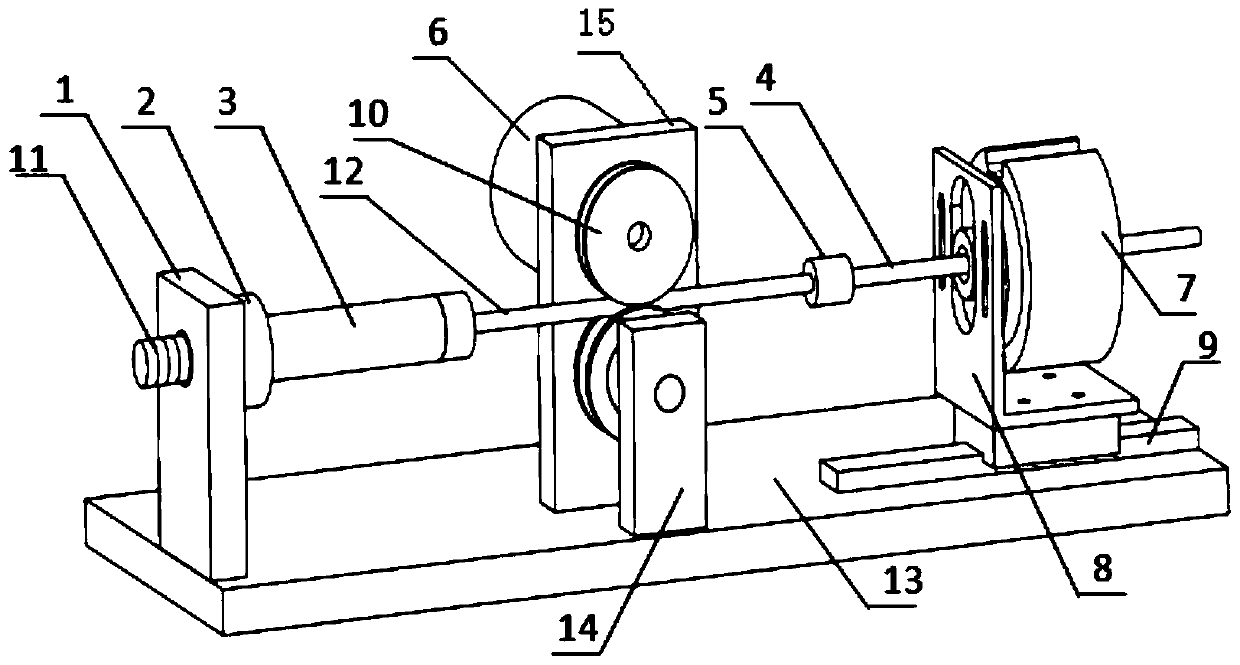
[0031] Embodiment: a kind of master-slave minimally invasive vascular interventional surgery robot assistance system doctor master console force feedback device (see figure 1 ), which is characterized in that it includes a cylindrical magnetic rod, an operating rod 12, a conduit 4, a connecting buckle 5 containing a bearing, a solid photoelectric encoder 6, a hollow photoelectric encoder 7, a coil 2, a bobbin 3, and a guide rail 10. Magnets 11; magnets 11 are arranged at both ends of the cylindrical magnetic conducting rod; the bobbin 3 is set on the cylindrical magnetic conducting rod; the coil 2 is wound on the bobbin 3; one end of the operating rod 12 Fixed with the bobbin 3, the other end is connected with the connecting buckle 5; one end of the conduit 4 is connected with the bearing in the connecting buckle 5, and the other end passes through the hollow photoelectric encoder 7, and is fixed with the hollow photoelectric encoder 7; The guide rail 10 is fixed to the solid ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More