

Decoupling control method of single leg joint of hydraulic four-leg robot
A quadruped robot, decoupling control technology, applied in the field of single-leg joint decoupling control of hydraulic quadruped robots, can solve the problems of complex control methods and difficult control methods to be transplanted into legged walking robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0089] The present invention will be further described in detail below in combination with specific embodiments.
[0090] The present invention is a prediction-based decoupling control method for a single-leg joint of a hydraulic quadruped robot, such as figure 1 As shown, it includes PID neural network decoupling control module (solid line box), neural network model reference decoupling control module (dotted line box) and predictive control module (dotted line box).
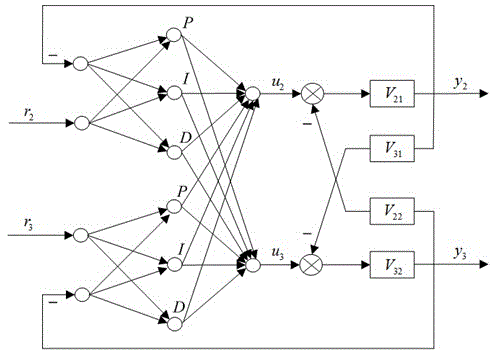
[0091] The PID neural network decoupling control module such as figure 2 As shown, two BP neuron sub-networks are used, and the hidden layers of each sub-network are proportional (P) neurons, integral (I) neurons and differential (D) neurons.
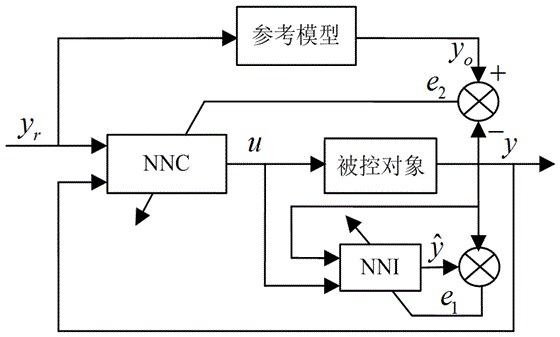
[0092] The neural network model refers to the decoupling control module such as image 3 As shown, including reference model, neural network identifier, neural network controller.
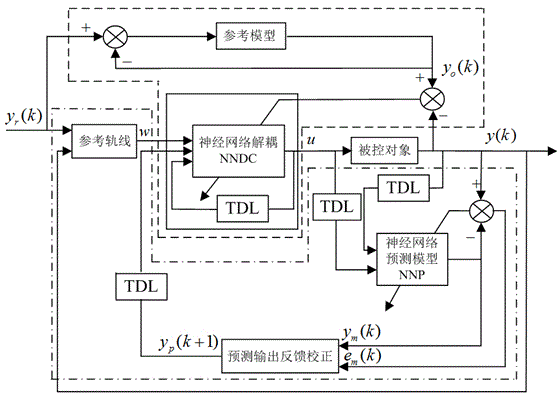
[0093] The predictive control module such as Figure 4 shown, including reference tr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More