

A Symmetrical Parallel Mechanism Without Singularity
A symmetrical and singular technology, applied in the field of symmetrical parallel mechanisms, can solve the problems of difficult mechanism trajectory planning, trajectory planning and control, etc., and achieve the effect of good motion characteristics, simple driving form and strong bearing capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
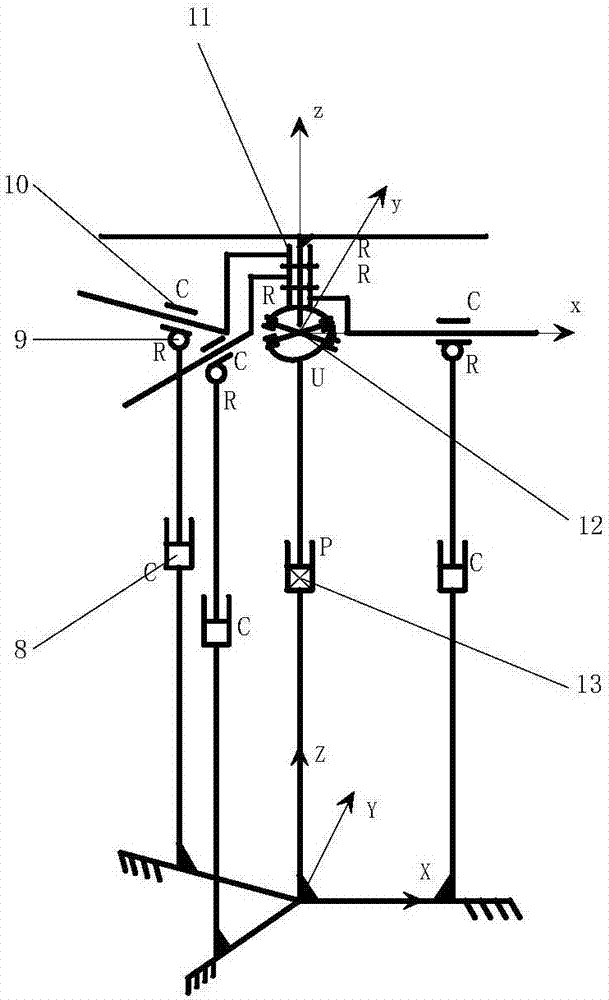
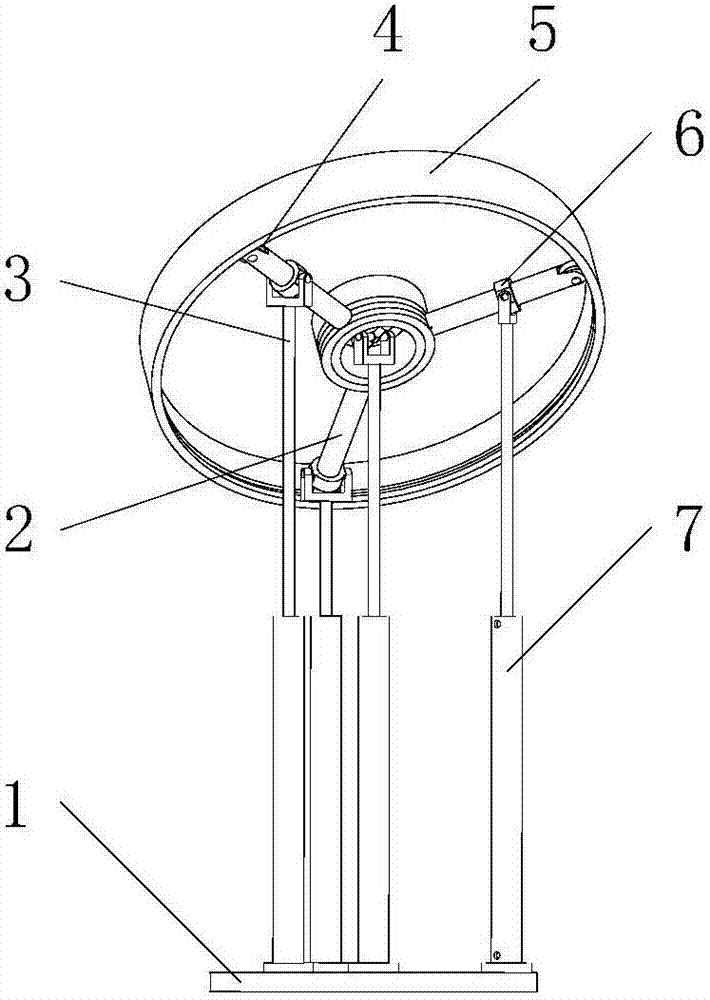
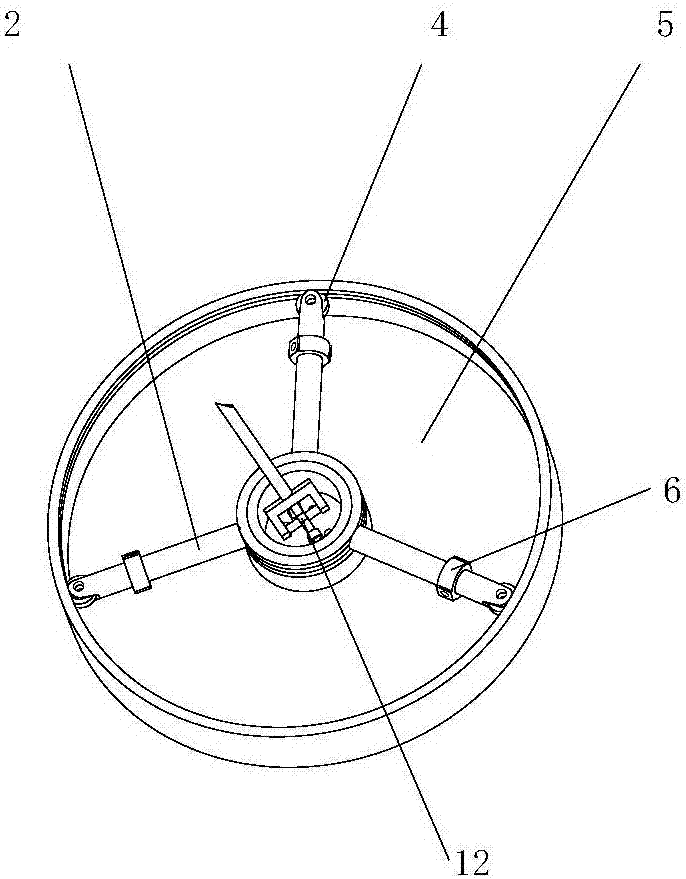
[0019] The present invention is a symmetrical parallel mechanism without singular configuration, such as figure 1 and figure 2 As shown, it includes the moving platform 5, the fixed platform 1 as the frame, and four motion branch chains connecting the moving platform and the fixed platform. And three identical motion branch chains, the three identical motion branch chains include the hydraulic cylinder 7 fixedly connected with the fixed platform 1, the three hydraulic cylinders 7 are respectively connected to the piston rod 3 through the cylinder pair A8, and the three piston rods 3 are respectively Connect with the ring member 6 through the rotating pair A9, such as image 3 As shown, the three annular members 6 are respectively connected to the sliding rod 2 through the cylindrical pair B10, one end of each sliding rod 2 is connected to the center of the moving platform 5 through the rotating pair B11, and the other end of the sliding rod 2 is connected to the roller 4 thr...
Embodiment 2
[0033] The present invention is a symmetrical parallel mechanism without singular configuration, such as figure 2 and Figure 4 As shown, it includes a moving platform 5, a fixed platform 1 as a frame, and four motion branch chains connecting the moving platform 5 and the fixed platform 1. Constraint chain and three identical motion branch chains, the three identical motion branch chains include hydraulic cylinder 7 fixedly connected with fixed platform 1, three hydraulic cylinders 7 and piston rod 3 through cylinder pair A8, and three piston rods 3 are respectively connected with the ring member 6 through the rotating pair A9, such as image 3As shown, the three annular members 6 are respectively connected to the sliding rod 2 through the cylindrical pair B10, one end of each sliding rod 2 is connected to the center of the moving platform 5 through the rotating pair B11, and the other end of the sliding rod 2 is connected to the roller 4 through the rotating pair, The roll...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More