

Six-degree-of-freedom manipulator
A technology of degrees of freedom and manipulators, applied in the field of manipulators, can solve problems such as difficult and complex operating conditions, difficult operations without dead ends, complex manipulator programming, etc., and achieve the effects of easy use, compact device, and convenient and effective control process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0029] A six-degree-of-freedom manipulator of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments of the present invention.
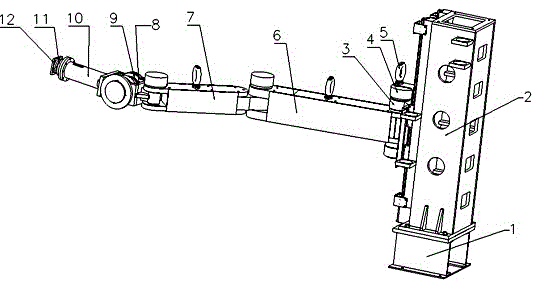
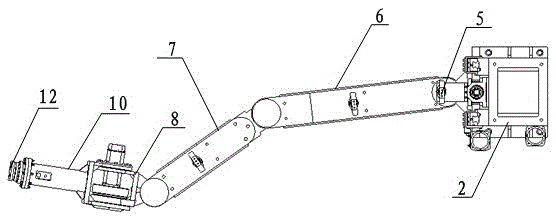
[0030] refer to Figure 1-3 , a six-degree-of-freedom manipulator, which includes a mechanical arm, a lifting column 2 and an output flange 12, the lifting column 2 is preferably a hollow cuboid structure, and several openings are arranged on the side wall. Arm B7, Robotic Arm C8, Robotic Arm D10.
[0031] The lifting column 2 is provided with a lifting track, and the mechanical arm A6 is connected to the lifting track of the lifting column 2 in parallel, and the connection is provided with a lifting platform 3 with a rotating shaft; the lifting platform 3 is provided with an electromagnetic brake 4, which can limit the rotation of the rotating shaft at any time turn. The mechanical arm A6 can move up and down along the lifting track to form the first degree of freedom; the lift...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More