

Navigation positioning method based on ultra short base line
An ultra-short baseline, navigation and positioning technology, applied in the field of navigation and positioning based on ultra-short baseline, can solve the problems of large impact on the job site environment, cumbersome deployment and recovery process, no underwater acoustic communication function, etc. Delay compensation, simple operation, and the effect of improving navigation and positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
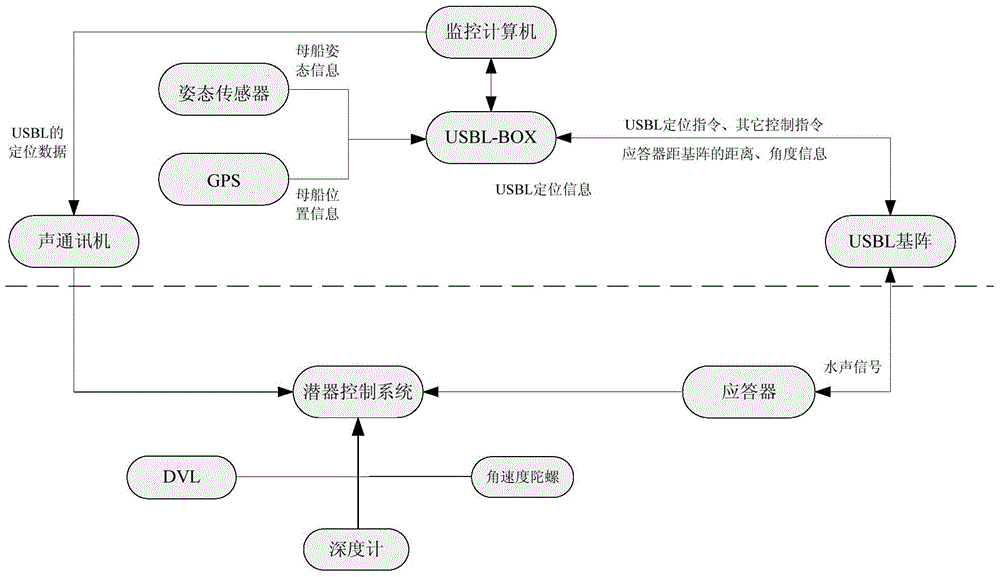
[0036] The present invention is made up of underwater robot, mother ship, USBL system, surface monitoring computer, acoustic communication machine, wherein underwater robot needs to carry depth meter, DVL (Doppler Velocimeter) and angular velocity gyro, such as figure 1 shown.
[0037] The USBL matrix communicates with the transponder on the underwater robot, and then the USBL-BOX calculates the position of the underwater robot, and then sends the position and the position information of the mother ship to the underwater robot through the acoustic communication machine.
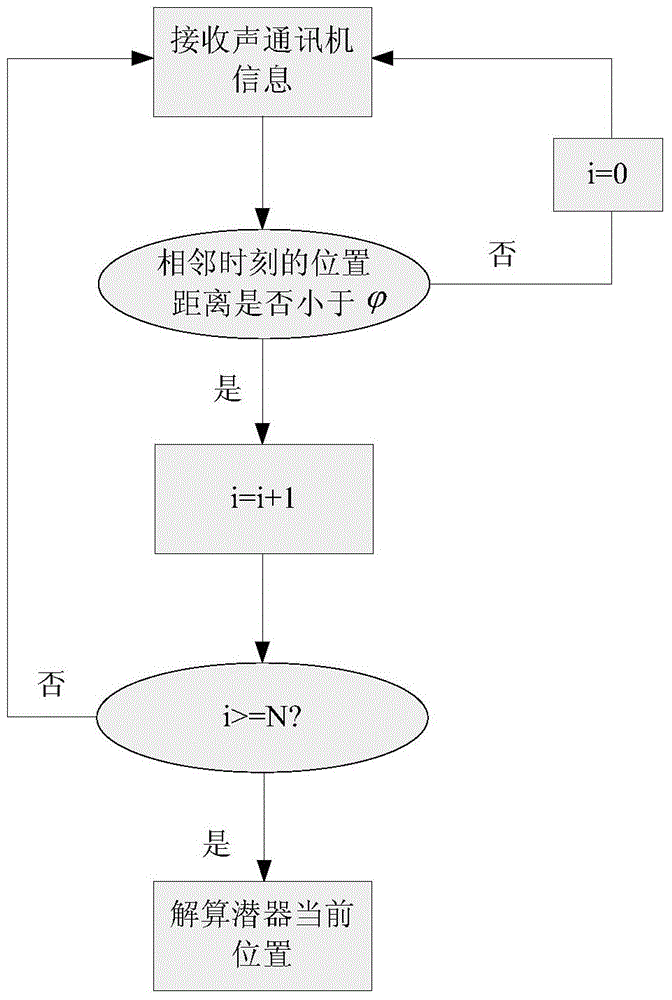
[0038] The identification method of USBL positioning data is as follows: figure 2 As shown in , the underwater robot receives the information sent by the mother ship's acoustic communicator and calculates the distance between it and the position data at the last moment (if ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More