

Mechanical arm force control assembling device and method
An assembly device and manipulator technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as less than ±0.01mm, difficult shaft hole assembly, etc., to prevent scratch damage, improve assembly efficiency, and reduce production cost effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
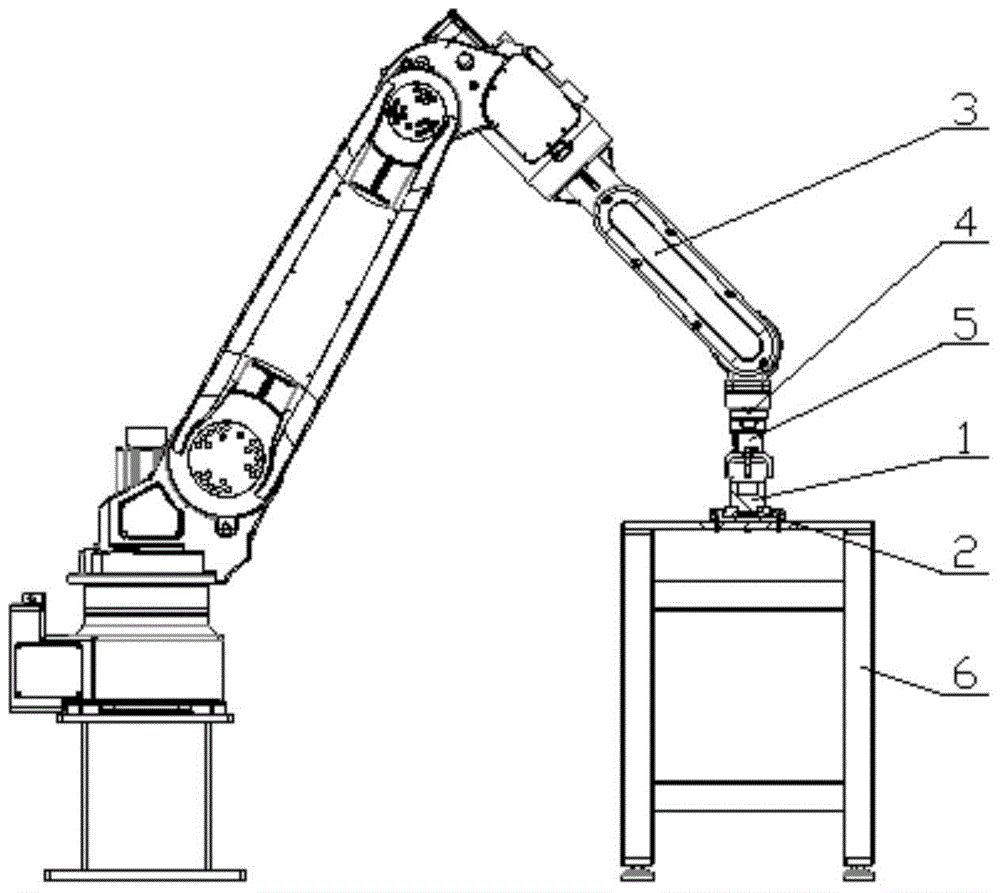
[0035] see figure 1 , this embodiment discloses a manipulator force control assembly device, including a manipulator main body 3 with a complete movable mechanism, a control system (not shown), a force sensor 4, a gripper 5 and an assembly platform 6 provided with a clamp; The system is installed inside the manipulator main body 3; the force sensor 4 is installed at the end of the manipulator main body 3 and connected to the control system; the gripper 5 is installed on the force sensor 4; the assembly platform 6 is arranged on the side of the manipulator main body 3, located Directly below hand 5.
[0036] The main body 3 of the manipulator undertakes the overall movement function, and drives the shaft workpiece 1 for assembly movement. The control system is equivalent to the "brain" of the device, used for processing and analyzing data information, and ordering the manipulator main body 3 to perform corresponding movements. The force sensor 4 is used to detect the contact ...
Embodiment 2
[0043] The present invention also provides a mechanical hand force control assembly method, comprising the following steps:
[0044] S01, fix the hole workpiece 2 on the assembly platform 6, the manipulator main body 3 drives the gripper 5 to grab and clamp the shaft workpiece 1, so that the shaft workpiece 1 is facing the hole workpiece 2 axially;
[0045] S02. The manipulator main body 3 drives the shaft workpiece 1 for axial trial assembly. If the force sensor 4 detects that the contact force during the trial assembly is zero, the assembly is performed directly;
[0046] S03. If the force sensor 4 detects that the contact force during the trial assembly is not zero, the control system analyzes and commands the manipulator main body 3 to drive the shaft workpiece 1 to find the hole center position of the hole workpiece 2 for reassembly.
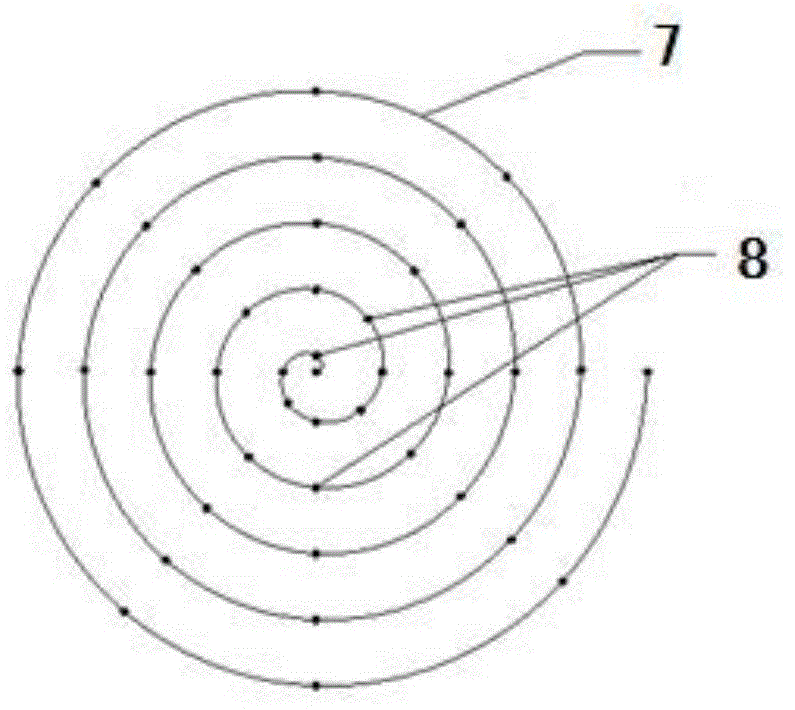
[0047] see figure 2 , further, the step S03 includes the following steps:
[0048] S031. If the force sensor 4 detects that the contact...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More