

Wheeled mobile robot controlled by gestures and operation method of wheeled mobile robot
A mobile robot and gesture control technology, applied in the field of robotics, can solve problems such as unnaturalness, rigid human-computer interaction methods, and inability of the robot to issue motion commands, and achieve the effect of good control effect and simple structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
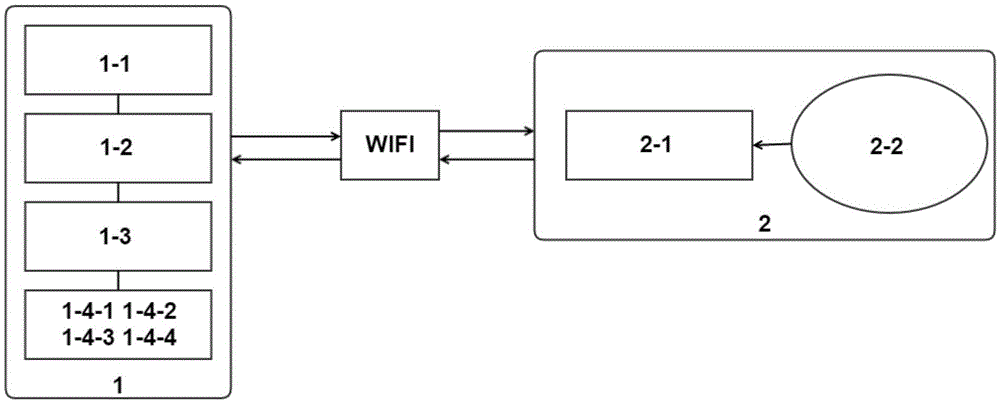
[0032] A kind of gesture-controlled wheeled mobile robot of the present embodiment comprises two parts of mobile operation part 1 and remote control part 2; wherein, mobile operation part 1 comprises a three-layer aluminum alloy profile frame 1-1, Kinect camera 1- 2. Embedded fanless industrial computer 1-3, brushless DC motor controller 1-4-1, lithium battery 1-4-2, two driving wheels 1-4-3 and a universal wheel 1-4- 4; The brushless DC motor controller 1-4-1 and the lithium battery 1-4-2 are placed on the bottom of the three-layer aluminum alloy profile frame 1-1, and the two drive wheels 1-4-4 are respectively placed on the three On the left and right sides of the bottom chassis of the three-layer aluminum alloy profile frame 1-1, a universal wheel 1-4-4 is arranged behind the bottom chassis of the three-layer aluminum alloy profile frame 1-1, and the three wheels are installed on the same level and Located on the same circle, the embedded fanless industrial computer 1-3 is...
Embodiment 2
[0035] The operation method of a gesture-controlled wheeled mobile robot described in Embodiment 1, the steps are as follows:
[0036] The first step is to enter the remote gesture control mode:
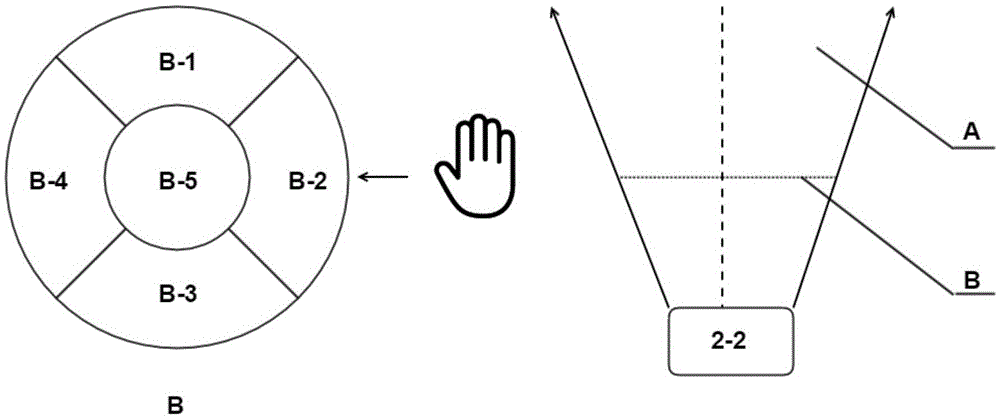
[0037] Connect the embedded fanless industrial control 1-3 in the mobile operation part 1 of the above-mentioned gesture-controlled wheeled mobile robot to the wireless router through the wireless network card, and set it as a virtual server by establishing a socket socket and remote The notebook computer 2-1 in the control part 2 realizes the WIFI data communication, and the notebook computer 2-1 is also connected to the wireless router. Interface connection, using WIFI to establish a data communication transmission channel, the LeapMotion somatosensory controller 2-2 in the remote control part 2 is placed in front of the laptop 2-1, and the robot remote controller needs to put his palm on the LeapMotion somatosensory controller 2-2 rounded frustum-shaped working area A, thus enter...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More