

Visual navigation method and system of mobile robot as well as warehouse system
A mobile robot and visual navigation technology, applied in the field of warehouse systems, can solve problems such as difficult maintenance of system stability, method effectiveness needs to be improved, insufficient stability and real-time performance of the visual system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0106] Embodiment 1: Mobile robot visual navigation method based on two-dimensional code and strip
[0107] This embodiment adopts the omnidirectional mobile robot independently developed by the Ningbo Institute of Materials Technology and Engineering, Chinese Academy of Sciences. The robot has 6 wheels, 2 driving wheels for driving, and 4 passive wheels for supporting, which can be completed in a plane. Three-degree-of-freedom movement; its size is 1.2m (length)*0.8m (width)*0.4m (height), and the load is 100kg; the robot is equipped with an industrial computer, a display screen, and an acquisition module (the Mercury series of Daheng Image) Camera MER-030-120UM / UC) and acquisition module supporting light source, obstacle avoidance sensor, etc. Carry goods in a production workshop, transport them from the designated location to the target location and return, with a path of about 100m. Such as figure 2 with Figure 4 As shown, according to the needs of the task, first pla...
Embodiment 2
[0151] Embodiment 2: Mobile robot visual navigation system No.1 based on two-dimensional code and strip
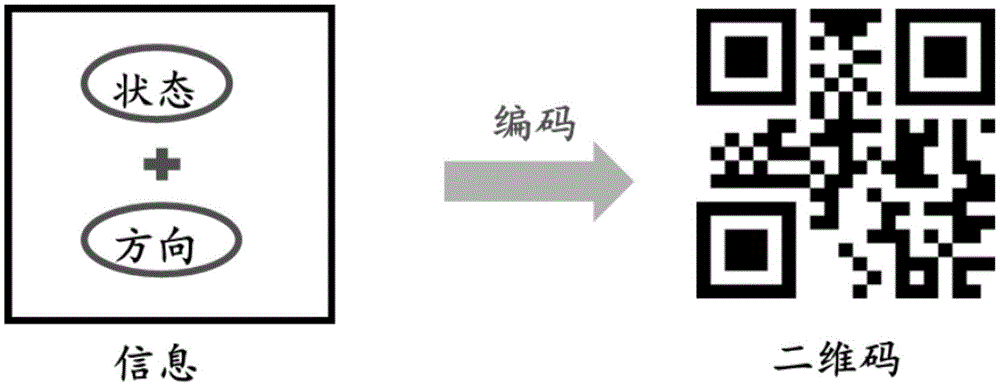
[0152] Such as Figure 5 As shown, the mobile robot visual navigation system of this embodiment is used in a predetermined scene, wherein a strip 400 is preset in the preset scene, and a two-dimensional code label 300 is arranged on the strip 400, and the two-dimensional code contains at least one for To determine the state transition information and speed change information of the mobile robot 200 movement, the mobile robot visual navigation system includes a communication acquisition module 100 and an industrial computer 600, wherein,
[0153] The collection module 100 is arranged on the mobile robot 200, and is used to collect the scene image in the scene where the mobile robot 200 is located and send it to the industrial computer 600;
[0154] The industrial computer 600 further includes:
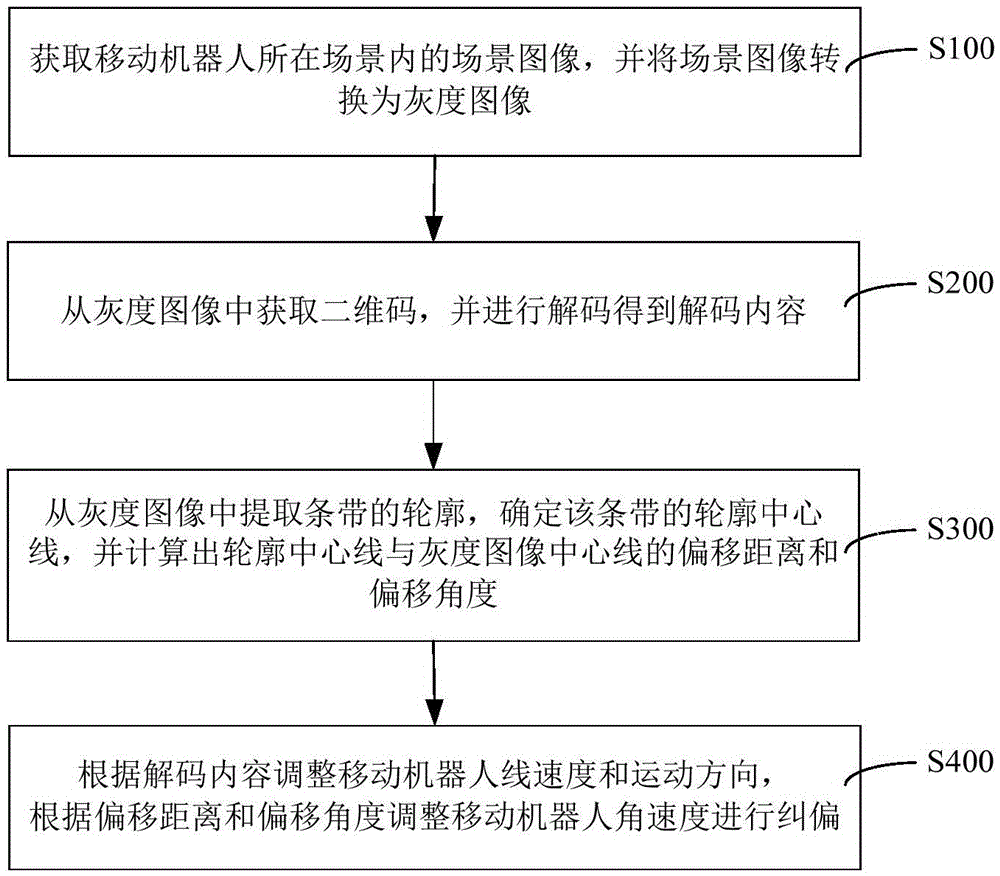
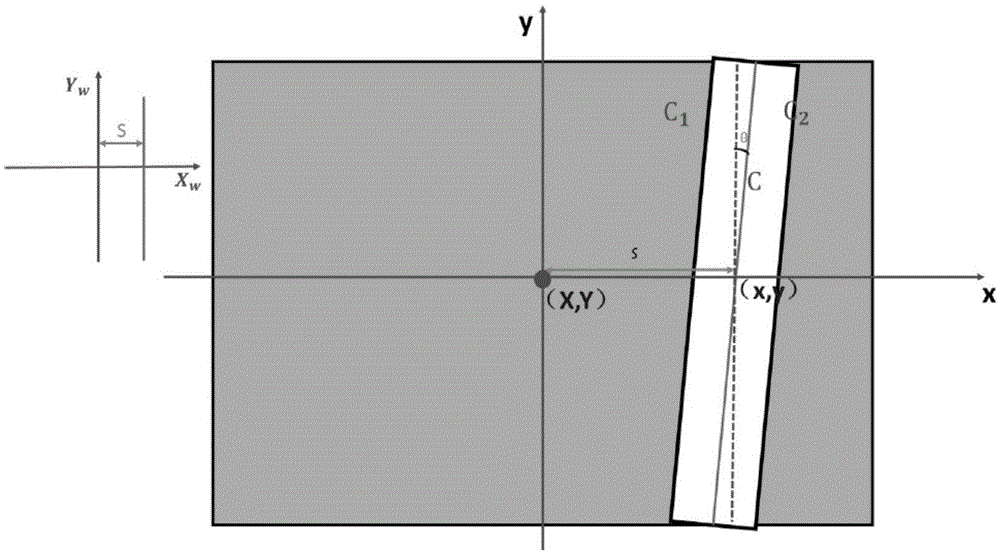
[0155] An image conversion module is used to receive a scene image and conver...
Embodiment 3
[0165] Embodiment 3: Mobile robot visual navigation system No.2 based on two-dimensional code and strip
[0166] Such as Figure 5 As shown, the mobile robot visual navigation system based on two-dimensional codes and strips in this embodiment includes: a mobile robot 200 equipped with an acquisition module 100, a plurality of two-dimensional code labels (two-dimensional code labels) set in a preset mobile robot scene Two-dimensional code label group 300), strip 400, obstacle avoidance sensor 500 and industrial computer 600.
[0167] Wherein: the acquisition module 100 is connected to the industrial computer 600 through communication, and can acquire the scene image comprising the two-dimensional code label 300 and the reflective tape 400, and transmit the scene image to the industrial computer 600 for processing, and the obstacle avoidance sensor 500 is used for avoiding in the environment. barrier, they are all connected with the industrial computer 600. The industrial com...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More