

Track type wall-climbing four-freedom degree parallel robot
A robot and degree of freedom technology, applied in the field of wall-climbing robots, can solve problems such as less degrees of freedom, weak operating force, and low motion precision, and achieve the effects of stable adsorption, strong adsorption, and flexible movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
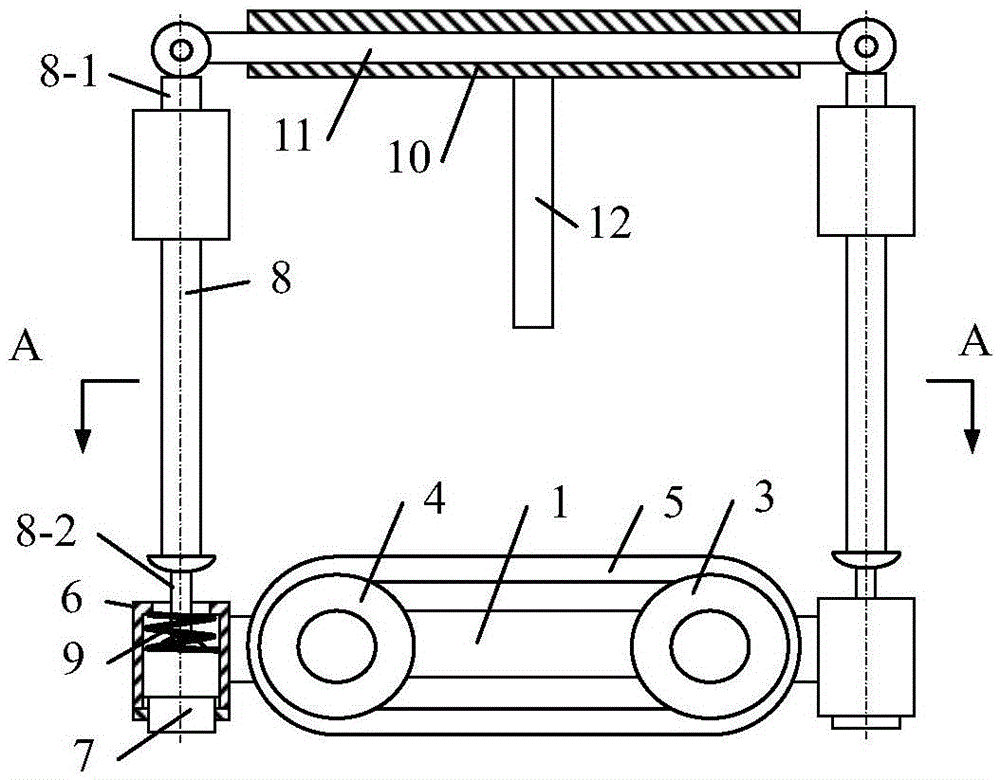
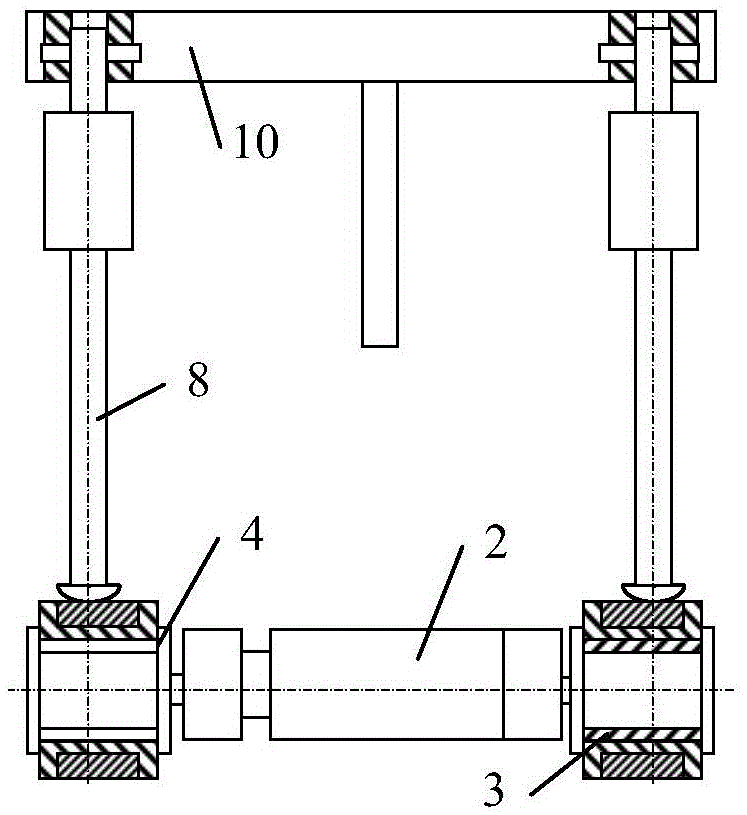
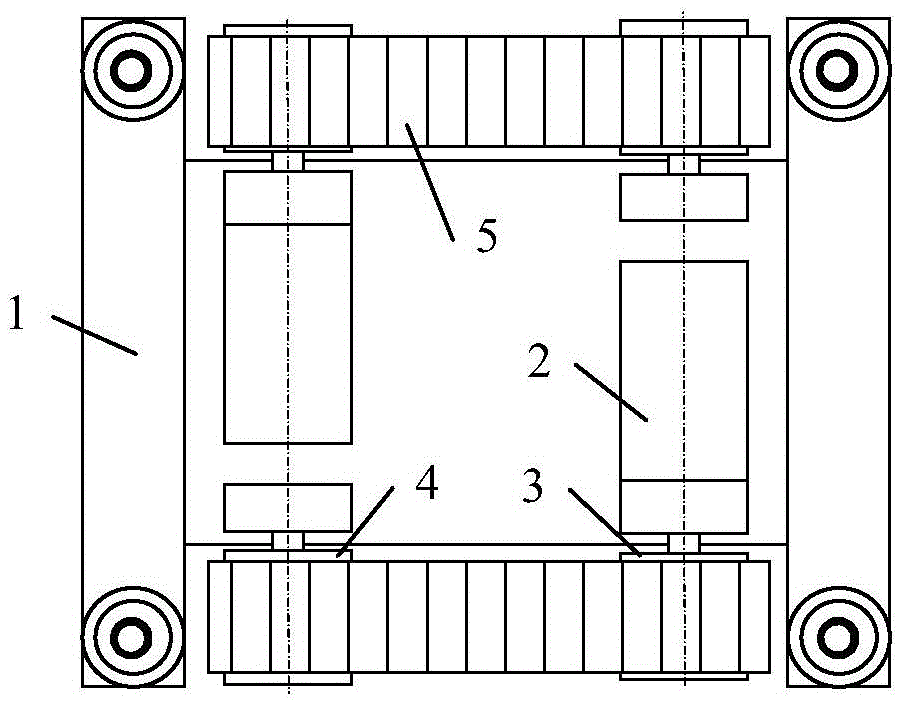
[0016] exist Figure 1-3 In the schematic diagram of the crawler wall-climbing four-degree-of-freedom parallel robot, the chassis 1 is rectangular, and the four sleeves 6 are evenly distributed at the four corners of the chassis. Opening diameters at both ends are smaller than the middle diameter; the closed-loop crawler track 5 in the permanent magnet crawler mechanism includes several frames and permanent magnet blocks; each frame 5-1 is provided with a cavity, and a permanent magnet block 5-2 is housed in the cavity. The front and rear ends of each frame are respectively provided with bosses and grooves, and the bosses of the front frame in every two connected frames are connected with the rotating pairs of the grooves of the rear frame to form a closed-loop track; the motor 2 is fixedly connected to the chassis, and the motor shaft is connected to the drive gear. 3 Coaxial connection, drive gear and guide gear 4 are set on both sides of the chassis, parallel to the chassis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More