

Three-degree-of-freedom helicopter anti-saturation attitude tracking control method
A tracking control and control method technology, applied in attitude control and other directions, can solve problems such as actuator saturation and system instability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0086] Below each part design method in the present invention is further described:
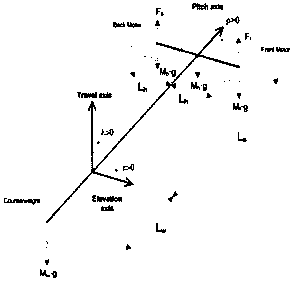
[0087] "An anti-saturation attitude tracking control method for a three-degree-of-freedom helicopter" of the present invention, see figure 1 , figure 2 As shown, the specific steps are as follows:
[0088] Step 1: Given expected tracking value
[0089] 1) if figure 2 As shown, the mass block in the 3-DOF helicopter experimental model is taken as the origin, and the 3-DOF helicopter body coordinate system is established with the three axes of pitch, yaw, and roll as the coordinate axes;
[0090] 2) The given desired attitude angle is x d =[ρ d ε d ] T , which can be a function of time x d (t), can also be a fixed value x d (c).
[0091] Step 2: Calculate the attitude angle tracking error z 1
[0092] When the desired attitude angle is a function of time x d (t), the attitude angle tracking error z 1 for
[0093] z 1 =x-x d (t)
[0094] When the desired attitude angle is a fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More