

Model ship based autonomous navigation control simulation system and method of under-actuated unmanned ship
A simulation system and autonomous navigation technology, applied in three-dimensional position/channel control, etc., can solve problems such as difficulties in large-scale ship control experiments, improve simulation performance and accuracy, improve safety and reliability, and reduce difficulty and cost. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The technical solutions of the present invention will be described in further detail below with reference to the accompanying drawings.
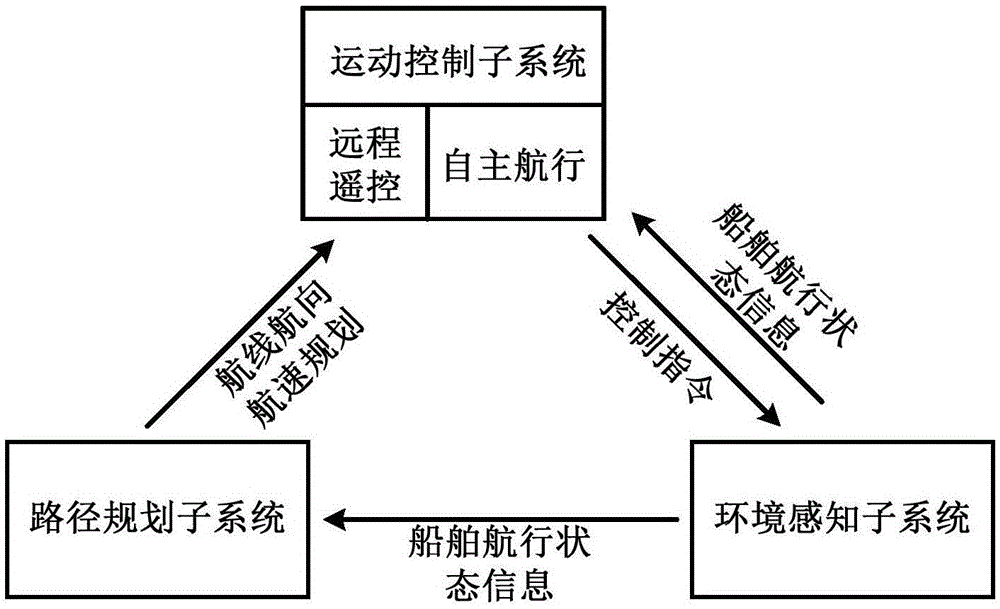
[0040] The present invention provides an autonomous navigation control simulation system for an underactuated unmanned ship based on a model ship. The simulation system is integrally set on the model ship, the model ship is set in a simulated channel, and simulated environmental factors are set in the simulated channel; for example, figure 1 As shown, the simulation system includes an environment perception subsystem, a path planning subsystem and a motion control subsystem; the environment perception subsystem is used to collect the model ship sailing state and simulated environmental factor information, and send them to the path planning subsystem and the motion control subsystem respectively. Control subsystem; the path planning subsystem is used to carry out navigation planning according to the model ship's navigation status and si...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More