

Feed-forward control method for robot servo system
A robot system, feed-forward control technology, applied in the direction of electric speed/acceleration control, etc., can solve the problem that it is difficult to ensure the smooth operation of the robot at high speed and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0078] In order to further illustrate the technical solutions adopted by the present invention, the specific implementation manners of the present invention will be described in detail below in conjunction with the accompanying drawings. This embodiment is only suitable for illustrating and explaining the present invention, and does not constitute a limitation to the protection scope of the present invention.
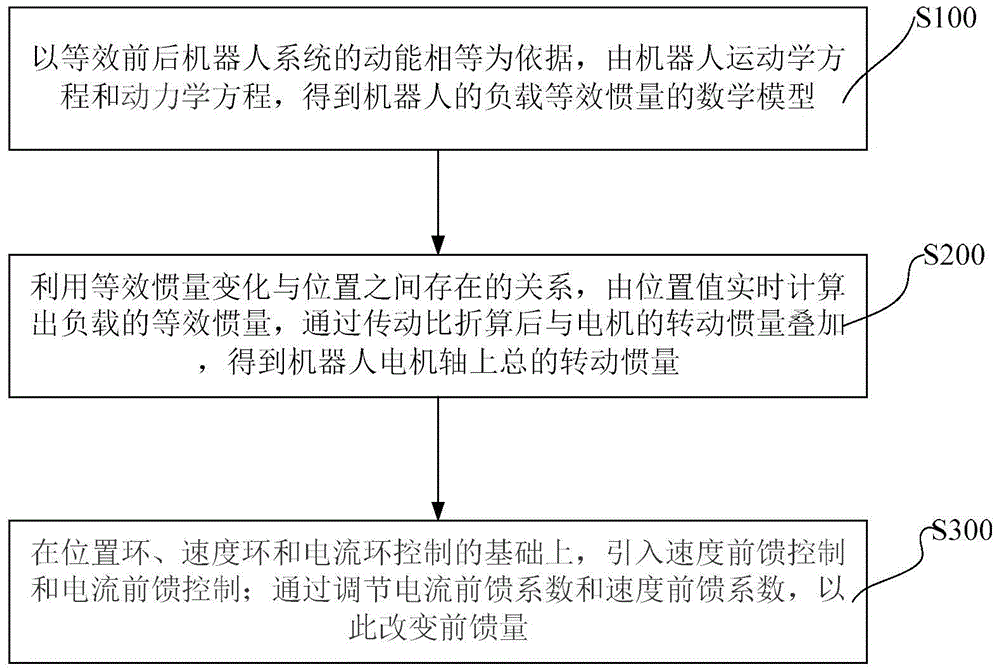
[0079] Such as figure 1 Shown, a kind of feed-forward control method that the present invention is applied to robot servo system comprises the following steps:
[0080] S100: Based on the equal kinetic energy of the robot system before and after the equivalent, the robot's load equivalent inertia is obtained from the robot's kinematics equation and dynamics equation mathematical model;
[0081] S200: Utilize equivalent inertia The relationship between the change and the position θ, the equivalent inertia of the load is calculated in real time from the position valu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More