

PMSM servo system control method based on improved model compensation ADRC
A servo system and improved model technology, applied in control systems, control generators, vector control systems, etc., can solve problems such as difficult to guarantee estimation accuracy, drastic changes, and large amplitude of disturbance items, so as to improve anti-disturbance ability and improve Estimation ability, effect of reducing estimation burden
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be described in further detail below according to the drawings and embodiments.
[0036] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
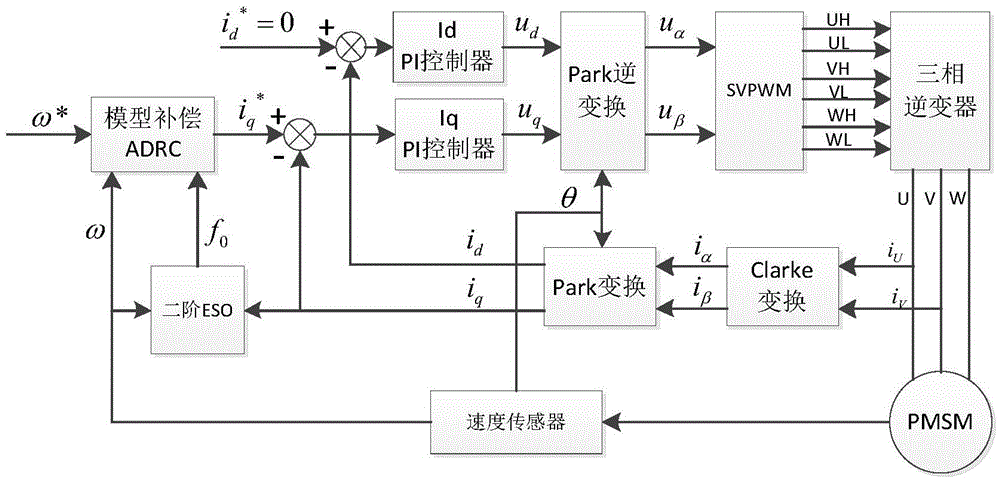
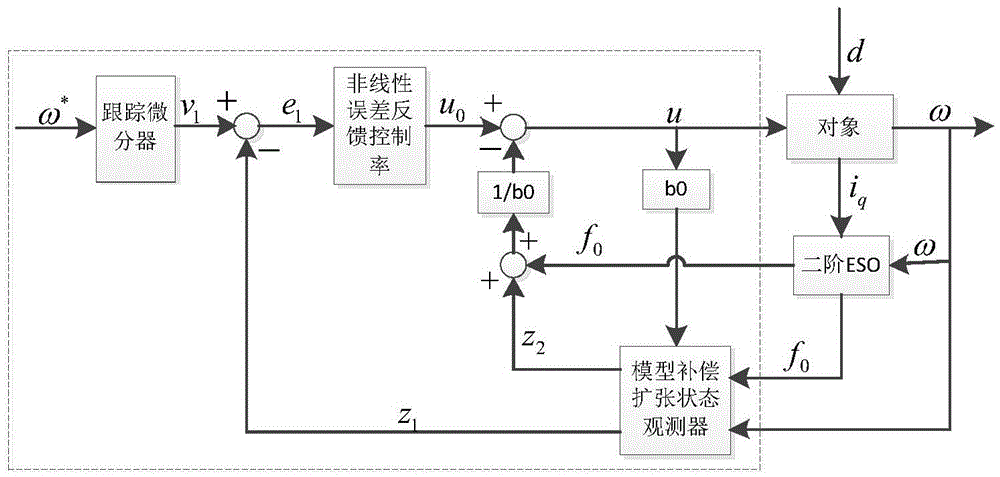
[0037] The structural block diagram of the PMSM servo system control method based on the improved model compensation ADRC provided by the present invention, as figure 1 As shown, on the basis of active disturbance rejection control, the second-order extended state observer of system disturbance is designed, and the disturbance term f of the second-order ESO observation is 0 Compensate the model compensation ESO in the first-order ADRC controller for the speed loop, and remove the known part of the model information in the disturbance compensation item, so that the ESO in the ADRC does not need to estimate al...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More