

Method for controlling PMSM (permanent magnet synchronous motor) servo system based on friction and disturbance compensation
A servo system and disturbance compensation technology, which is applied in the direction of motor generator control, electronic commutation motor control, single motor speed/torque control, etc., can solve the specific model with limited friction nonlinear compensation ability and no consideration of friction nonlinearity System dynamic performance and stability impact and other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The accompanying drawings disclose a schematic structural diagram of a preferred embodiment of the present invention without limitation, and the technical solutions of the present invention will be described in detail below with reference to the accompanying drawings.
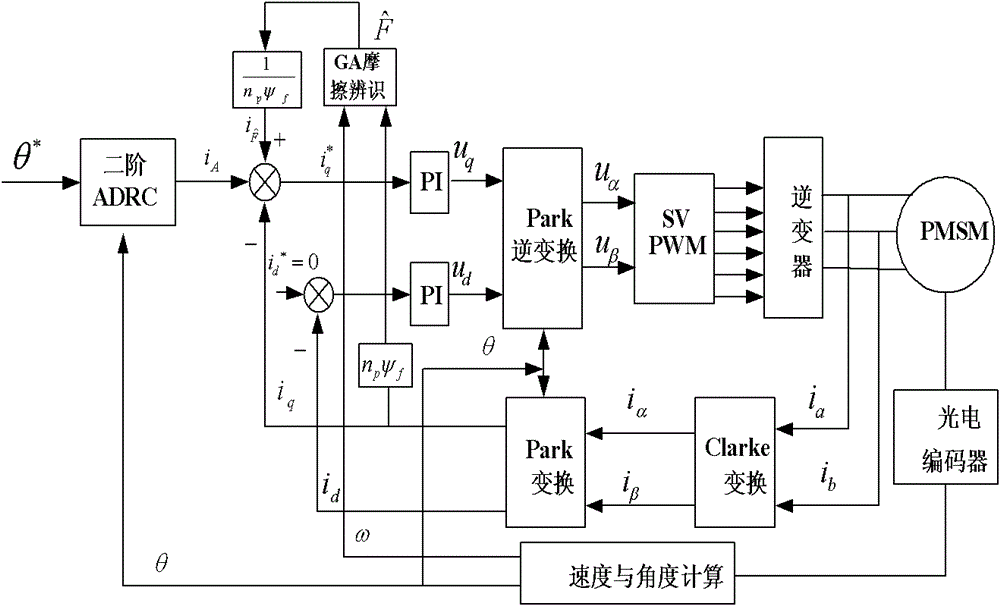
[0028] like figure 1 As shown, it discloses the system block diagram of the PMSM servo system control method based on friction and disturbance compensation according to the present invention, which adopts a photoelectric encoder to collect the rotational speed signal and rotor position signal of the PMSM servo motor, and the photoelectric encoder is installed inside the motor. At the same time, the Hall current sensor is used to collect the current signal of the motor. According to the collected motor current signal and speed signal, the torque current signal and the angular velocity signal of the load are calculated, the Stribeck friction model is used for modeling, and the genetic algorithm is used to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More