

Planning method for mixed path of mobile robot under multi-resolution barrier environment
A mobile robot and hybrid path technology, applied in the field of mobile robots, can solve problems such as blindness in initial planning, poor real-time obstacle avoidance ability of unknown dynamic or static obstacles, and lack of environmental modeling
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
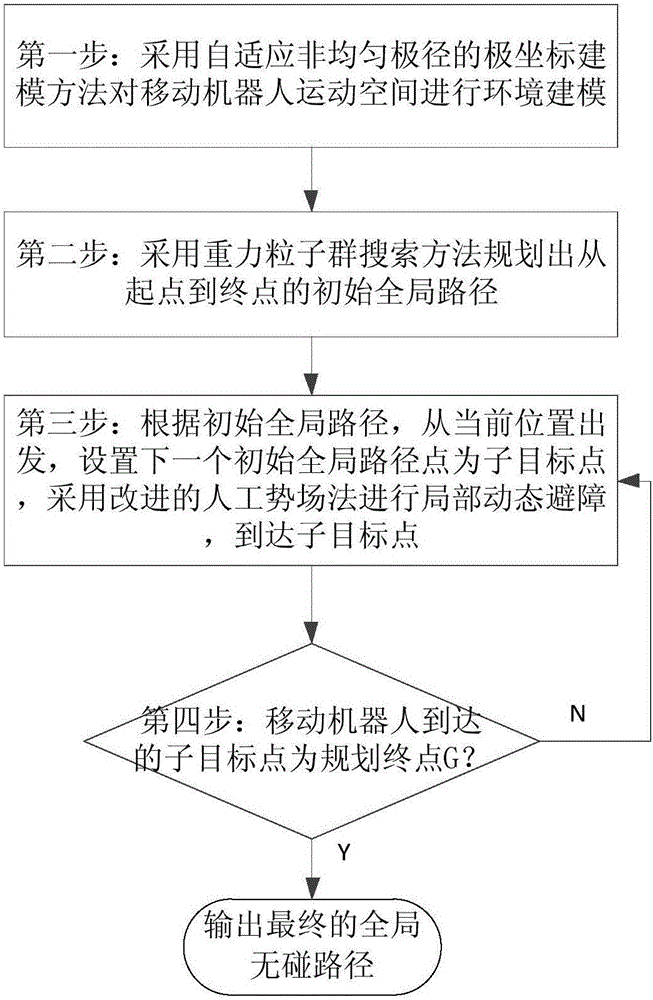
[0098] figure 1 It is an overall flow chart of the present invention. The present invention comprises following four steps:
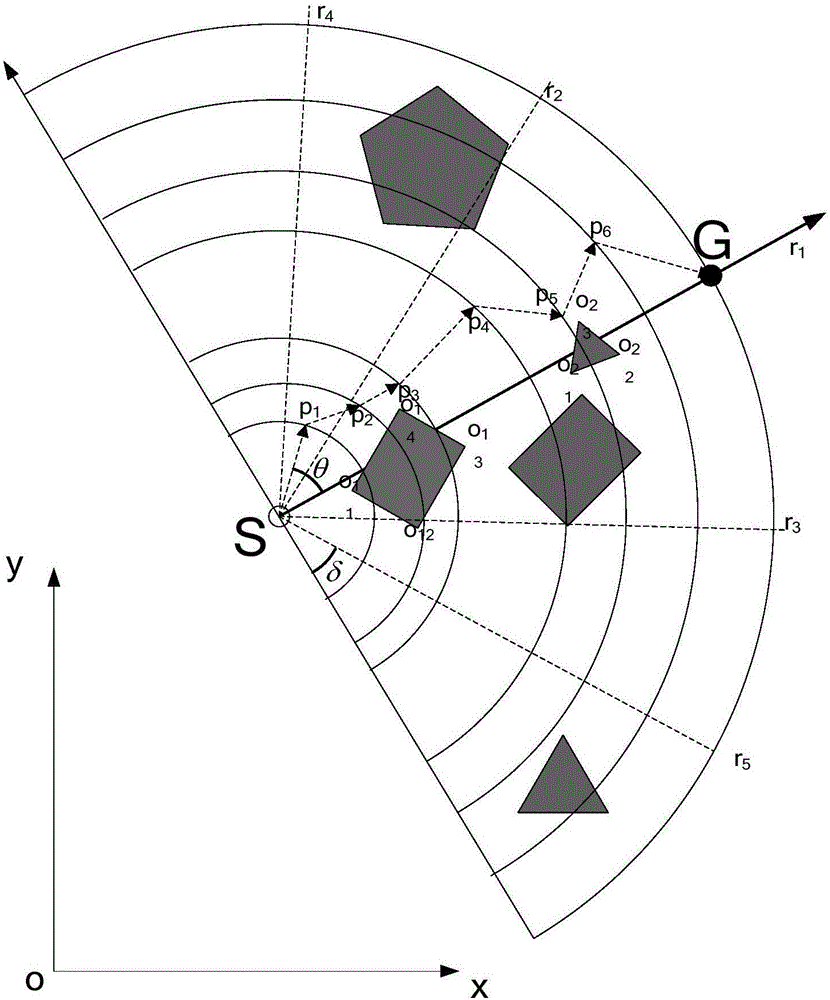
[0099] Step 1: Use the polar coordinate modeling method of adaptive non-uniform polar radius to model the environment of the mobile robot's motion space.
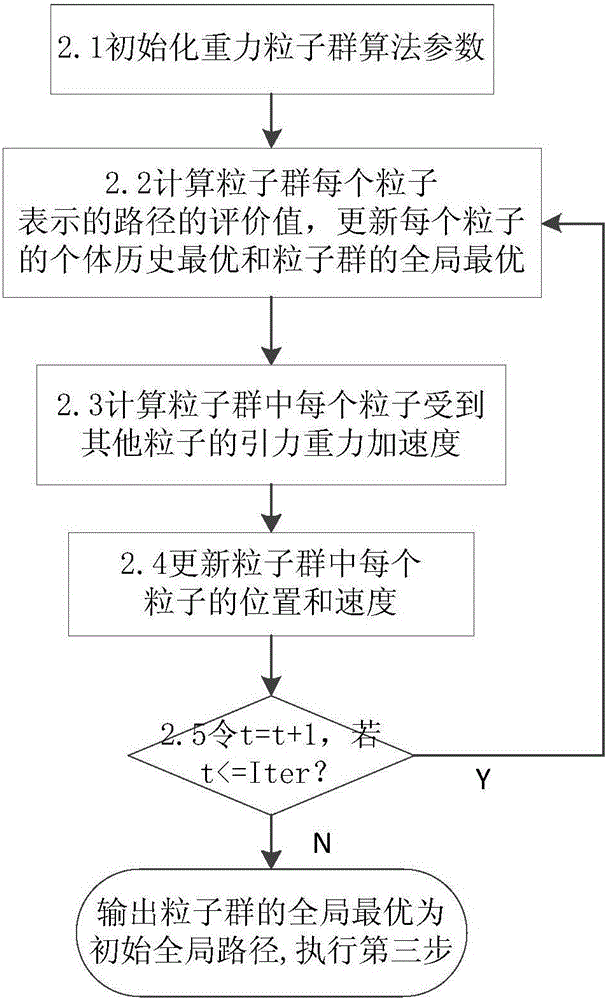
[0100] The second step: use the gravity particle swarm search method to plan the initial global path from the starting point to the end point, and the robot will perform local dynamic obstacle avoidance while walking along this initial global path.
[0101] Step 3: According to the initial global path, starting from the current position, set the next initial global path point as the sub-target point, and use the improved artificial potential field method for local dynamic obstacle avoidance to reach the sub-target point.
[0102] Step 4: Determine whether the sub-target point reached by the mobile robot is the target point position G, if yes, output the final global non-touch path, and the entire ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More