A kind of underwater excavation soft robot
A robot and software technology, applied in the field of robots, can solve problems such as further improvement of tunneling efficiency, difficulty in equipment manufacturing, transportation, fixed probe shape, etc., and achieve the effect of realizing operation automation, ensuring safety and operation efficiency, and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The technical solution of this patent will be further described in detail below in conjunction with specific embodiments.
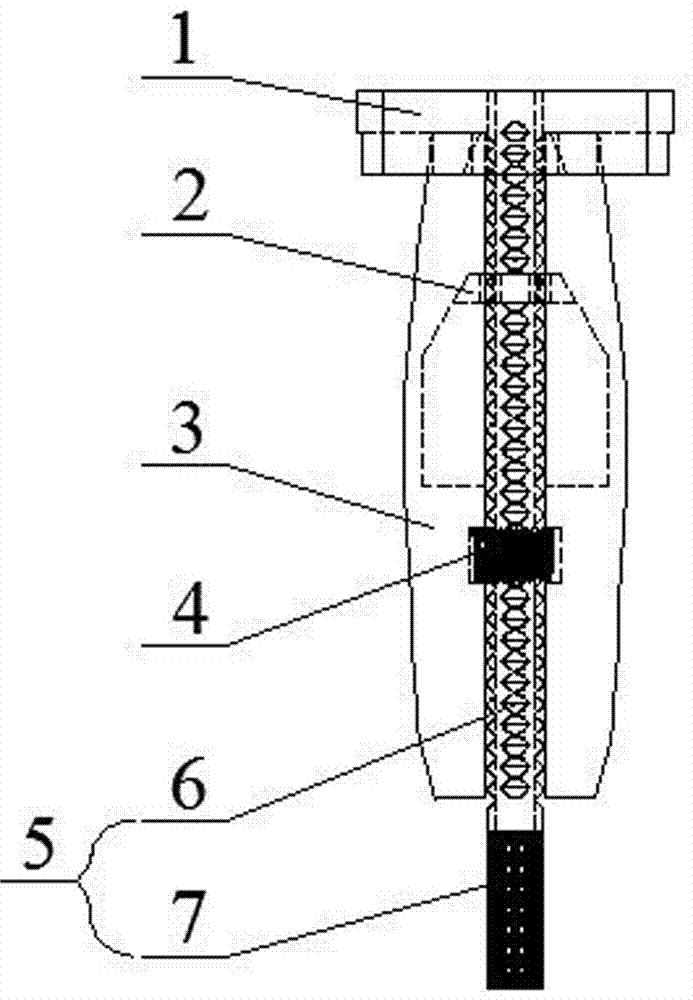
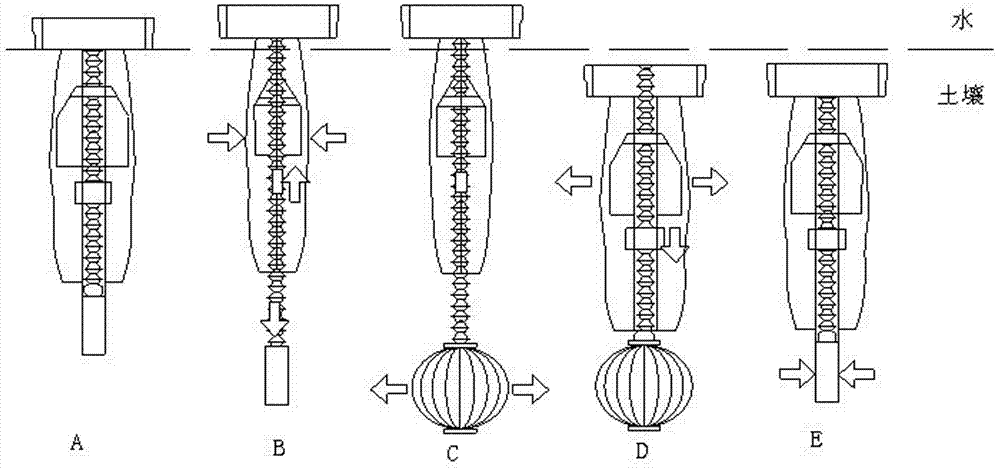
[0017] see Figure 1-2 , a soft robot for underwater excavation, including a base 1, a wedge block 2, a shell 3, a coupling spring 4 and a soft foot 5, the shell 3 is connected by a two-petal mirror-symmetrical single-piece shell through a coupling spring 4 The shell 3 is installed on the base 1, and the shell 3 can slide horizontally on the base; the robot soft foot 5 includes telescopic soft body 6 and expansion soft body 7, and the soft robot foot 5 is driven by gas. The telescopic soft body 6 is the lowering part of the foot 5, which is elongated when inflated to realize the lowering function, and shortened when deflated to realize the function of pulling the shell downward; the expansion soft body 7 is the anchoring part of the foot, which expands into a It is close to a spherical shape to realize the anchoring function of the foot; the wedge...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com