

Far-near distance man-machine interactive system based on 3D sight estimation and far-near distance man-machine interactive method based on 3D sight estimation
A technology of line of sight estimation and human-computer interaction, which is applied in the field of human-computer interaction systems at far and near distances, and can solve different problems.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0102] The technical solution of the present invention will be further described in detail below in conjunction with the accompanying drawings, but the protection scope of the present invention is not limited to the following description.
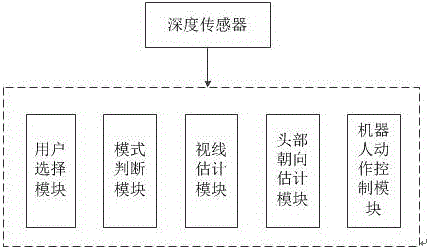
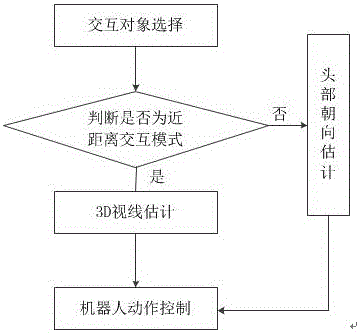
[0103] like figure 1 As shown, a far-short distance human-computer interaction system based on 3D line-of-sight estimation, including a user selection module, a mode judgment module, a line-of-sight estimation module, a head orientation estimation module and a robot action control module;
[0104] The user selection module is used to select the user closest to the robot as an interaction object;
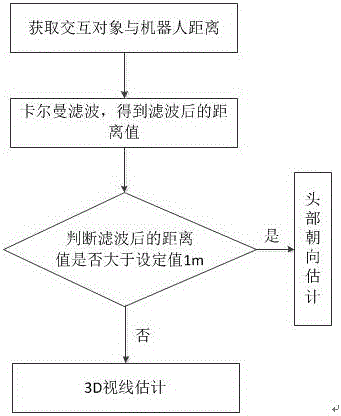
[0105] The mode judging module is used to judge the interactive mode according to the distance between the interactive object and the robot: when the distance between the interactive object and the robot is not greater than 1, it is a close-range interactive mode; when the distance between the interactive object and the robot is greater than When...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More