

Trajectory tracking control method of three-joint spot welding robot
A control method and trajectory tracking technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as insufficient control quality such as convergence speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] In order to make the technical solutions and design ideas of the present invention clearer, a more detailed description will be given below in conjunction with the accompanying drawings and embodiments.
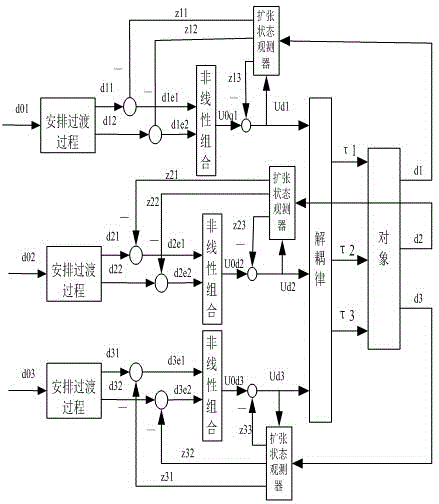
[0057] The present invention is aimed at a three-joint spot welding robot. In order to overcome the above-mentioned existing control methods that cannot solve the problems of accurate trajectory tracking and poor anti-interference ability, the present invention adopts anti-interference control technology with decoupling to design a spot welding robot. Anti-interference ability and precise tracking control strategy. An independent anti-interference controller with decoupling characteristics is designed for each joint of the spot welding robot, and at the same time, the decoupling control in the algorithm is used for the coupling between the joints, which can not only effectively control the joints The control also solves the coupling problem between the joints. At the s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More