Universal robot joints and robot arm
A robot arm and robot technology, applied in the directions of manipulators, claw arms, manufacturing tools, etc., can solve problems such as cable knots and windings, and achieve the effects of easy replacement, easy control and management, and easy use.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
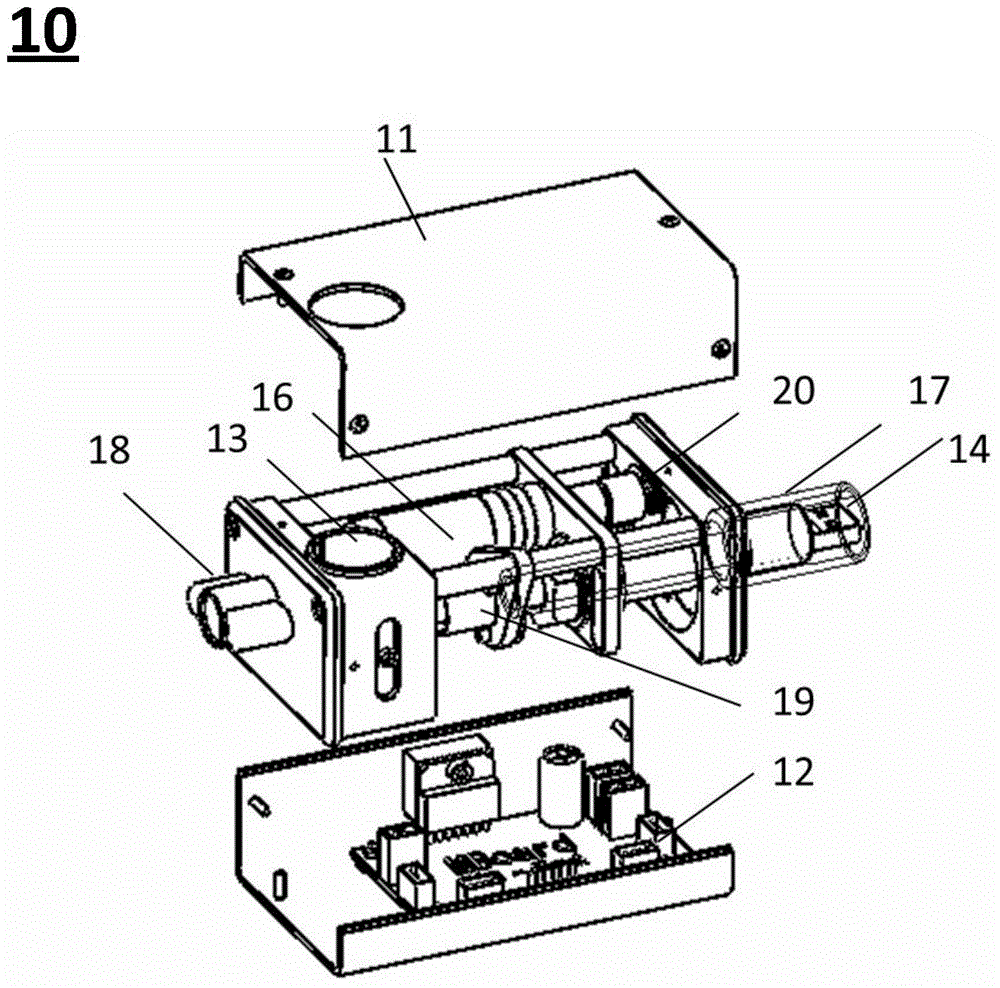
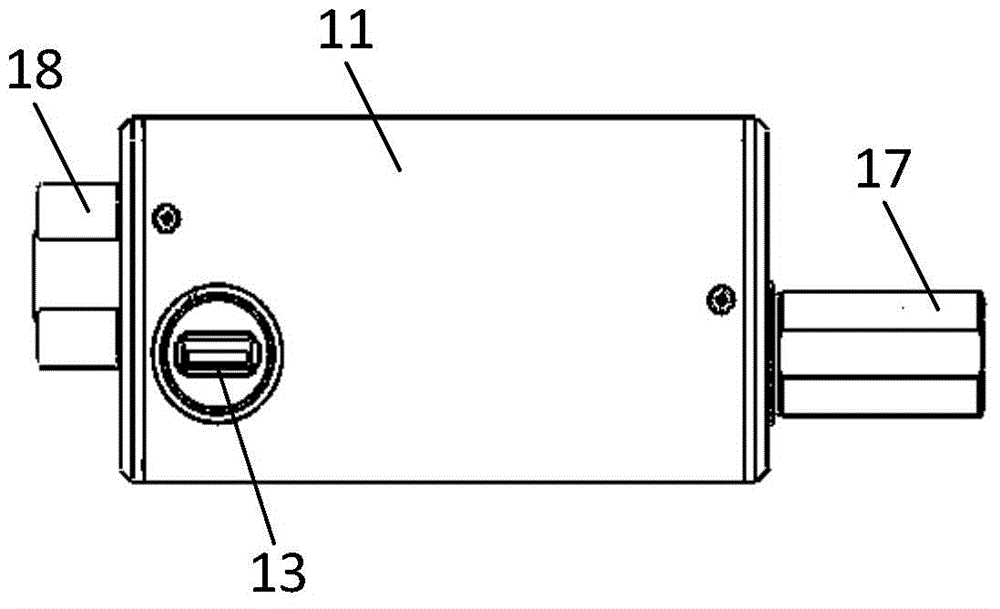
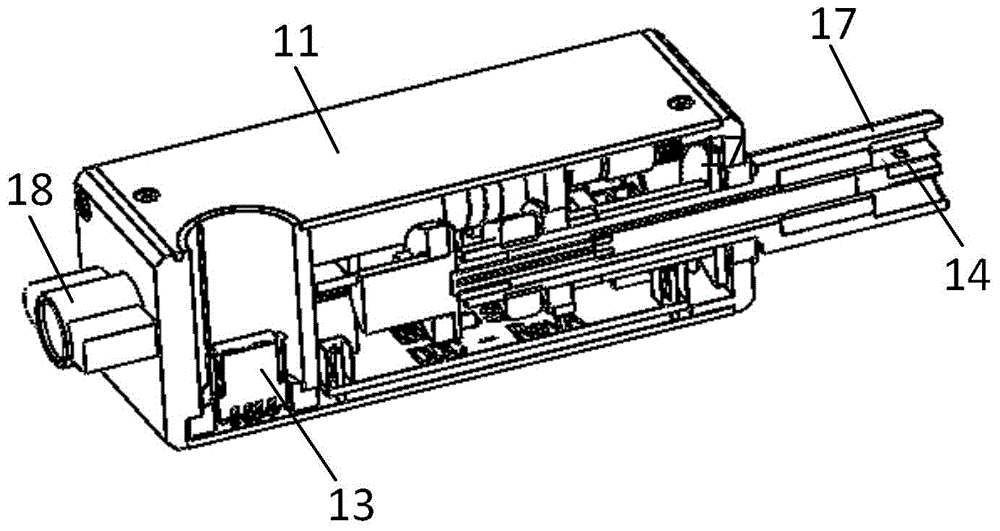
[0027] Please refer to Figure 1 to Figure 3 In this embodiment, a universal joint 10 for a robot is proposed, which includes a housing 11, a motor and a control unit, and a first interface terminal 13 and a second interface terminal 14 arranged on different sides of the housing 11 ;
[0028] Wherein, the first interface terminal 13 includes a force transmission shaft 17 and a first electrical interface fixed at one end of the force transmission shaft 17, and the second interface terminal 14 includes a force transmission shaft 17 and a second electrical interface. The second electrical interface is fixed inside the other end of the force transmission shaft 17, and both have the same rotation axis or translation track, which can rotate or translate synchronously; the force transmission shaft 17 has two ends connected to the first interface respectively The terminal 13 and the second interface terminal 14 are used to transmit force;
[0029] The first interface terminal 13 is the f...
Embodiment 2
[0043] In this embodiment, the robot universal joint 10 is the same as the first embodiment. The difference is that it can be applied to different robot arms. Please refer to Figure 5 In addition to the robot universal joint 10, the robot arm also includes an expansion component 21, and both the expansion component 21 and the robot universal joint 10 are connected through a first interface terminal 13 and a second interface terminal 14. A plurality of expansion plugs (not shown in the figure) are provided on the surface of the expansion component 21, signal and power lines and a plurality of branch structures (not shown in the figure) are arranged inside, and the signal and power lines are branched by the The structure is divided into multiple paths, and multiple universal joints 10 of the robot are simultaneously connected through the expansion plug, so as to meet the requirements of robot arm control. Specifically, how many robot universal joints 10 need to be used in a robot...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com