

Mobile robot three-dimensional mapping and obstacle avoidance method based on space bag of words model
A mobile robot and bag-of-words model technology, applied in two-dimensional position/channel control, etc., to achieve the effect of reducing memory footprint, reducing cost, and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] Below in conjunction with accompanying drawing and specific embodiment, further illustrate the present invention, should be understood that these examples are only for illustrating the present invention and are not intended to limit the scope of the present invention, after having read the present invention, those skilled in the art will understand various aspects of the present invention All modifications of the valence form fall within the scope defined by the appended claims of the present application.
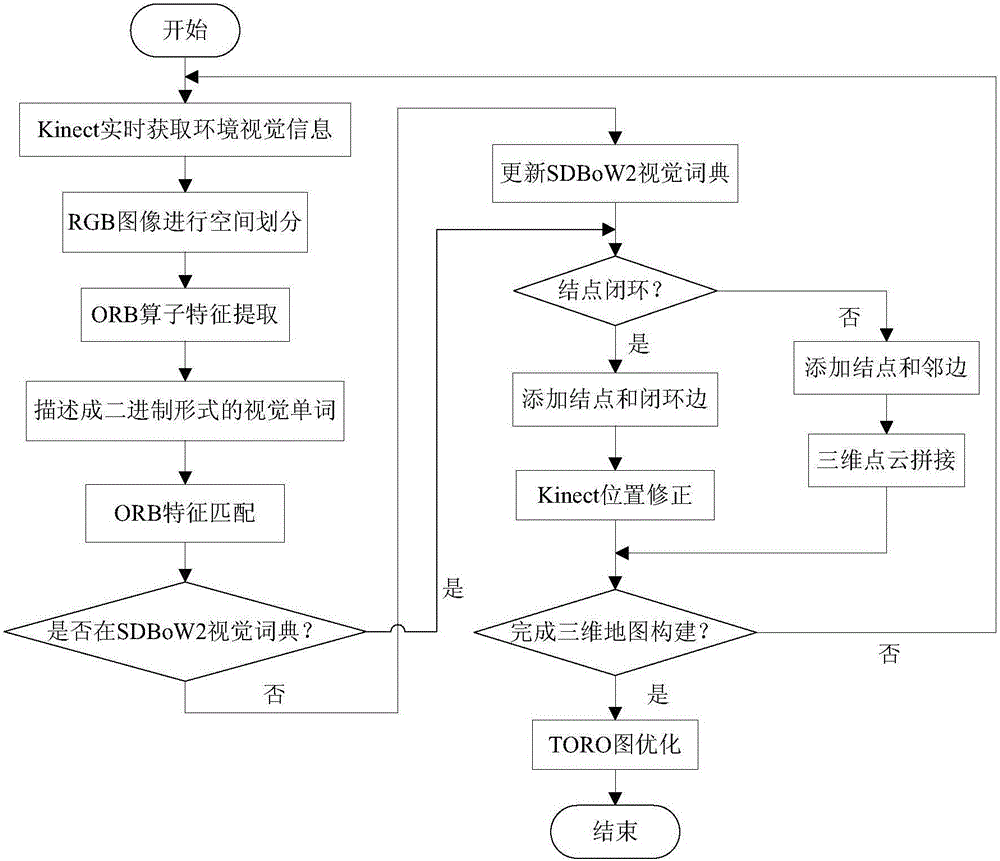
[0030] A three-dimensional map creation and obstacle avoidance navigation method for a mobile robot based on a spatial bag-of-words model, comprising the following steps:
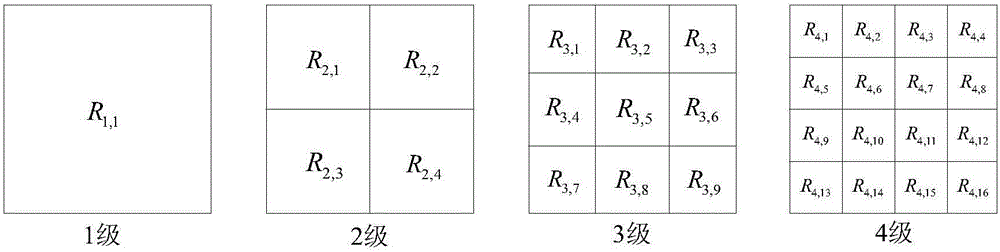
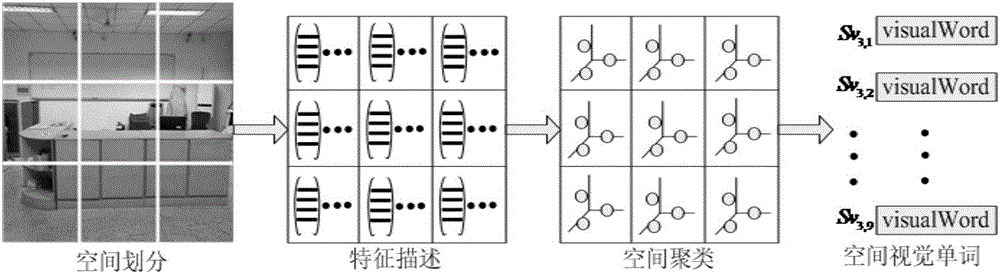
[0031] Step 1. Collect Kinect sensor data during the robot environment exploration process, and use the SDBoW2 model that integrates spatial relationships to describe the scene image features.
[0032] In the step 1, the feature of the scene image is described by the SDBoW2 model fused with the sp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More