Vision north finding method based on correction of angle of robot
A robot and angle technology, applied in the research field of computer image processing, can solve the problems of external magnetic field interference and influence accuracy of electronic compass, and achieve the effect of reducing manual work, avoiding the influence of measurement accuracy, and expanding the idea of processing problems.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
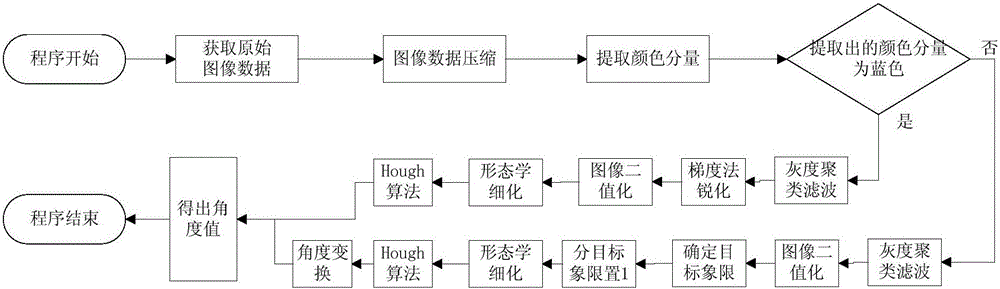
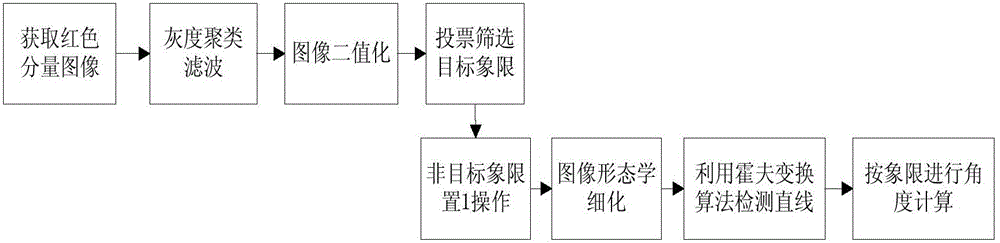
[0037] In the north indicator, the red pointer represents the baseline, that is, the zero-degree direction in the navigation coordinate system, and the straight line direction of the blue part is consistent with the direction of the robot, which is called the target line. When the compass device moves angularly with the robot, due to the earth's magnetic field, the reference line will always point in one direction, and the target line will deflect with the angular displacement of the robot. When the angle of the target line is consistent with the zero-degree direction agreed on the navigation map, the angle between the target line and the reference line represents the current angle value of the robot. When the angle of the target line is inconsistent with the zero-degree direction agreed on the navigation map, record this part of the angle difference as Δθ, and the angle between the target line and the reference line needs to be added to Δθ to represent the current angle value ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com