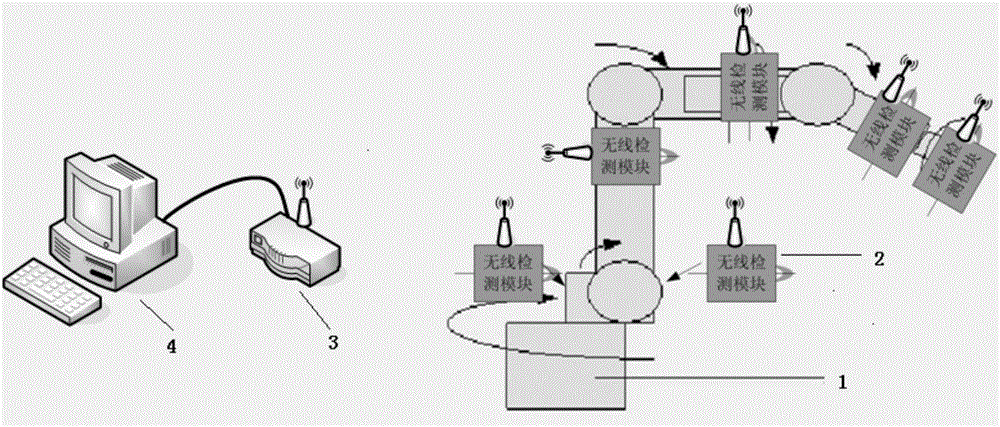
Industrial robot kinematics performance testing device
A robot kinematics and testing device technology, applied in measurement devices, linear/angular velocity measurement, instruments, etc., can solve the problem of not finding a test platform, and achieve the effect of good evaluation and good application prospects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0030] In this implementation example, the MP6050 sensor is first used. The sensor uses three 16-bit ADCs for the gyroscope and the accelerometer respectively, and converts the measured analog quantity into an outputtable digital quantity. In order to accurately track fast and slow motion, the measurement range of the sensor is user controllable, the gyroscope can measure the range of ±250, ±500, ±1000, ±2000° / second (dps), and the accelerometer can measure the range For ±2, ±4, ±8, ±16g.
[0031] The system adopts STM32F103RC 32-bit ARM single-chip microcomputer, communicates with MP6050 through 20MHz SPI interface, and uses interrupt mode to read registers and set command parameters by MPU6050. The single-chip microcomputer filters the obtained sensor data through software programming, and then calculates and obtains the values of velocity, acceleration, angular velocity and angular acceleration according to the velocity acceleration formula and the angular velocity angula...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More