

A hybrid localization method for mobile robots based on laser and vision
A mobile robot and hybrid positioning technology, applied in the direction of navigation calculation tools, etc., can solve the problems of low environmental recognition, ultrasonic accuracy, high maintenance cost of topological maps, etc. unstable effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The solution of the present invention will be further described in detail below with reference to the accompanying drawings and specific embodiments.
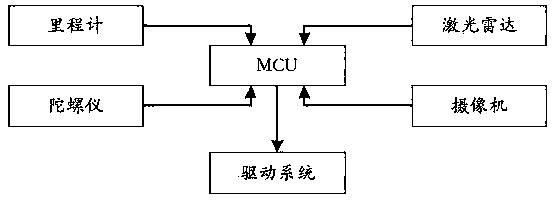
[0024] like figure 2 As shown, the mobile robot in this embodiment includes an odometer, a gyroscope, a lidar, a camera (visual sensor), a drive system and a core control board (MCU). Specifically, the drive system in this embodiment consists of left and right It is made up of wheels and driven by different motors. It should be understood that the mobile robot can also include other parts (such as a vacuum system, a sensor system, an alarm system, etc.), which are not related to the technical solution of the present invention illustrate.
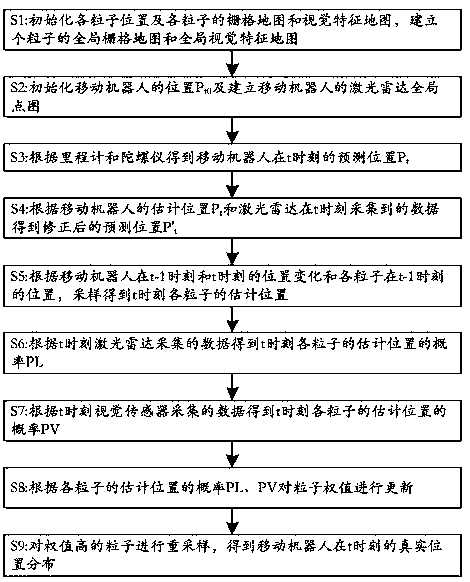
[0025] like figure 1 As shown, the positioning method based on the particle filter algorithm of the mobile robot of the present invention comprises the following steps:
[0026] S1: Initialize the position of each particle and the grid map and visual feature map of each particle, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More