

Robot gesture recognition method and device and robot system
A gesture recognition and robot technology, applied in the field of robotics, can solve problems such as unfriendly, cumbersome operation, and single function, and achieve the effect of expanding human-computer interaction capabilities.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The technical solutions of the present invention will be further elaborated below in conjunction with the embodiments and the accompanying drawings.
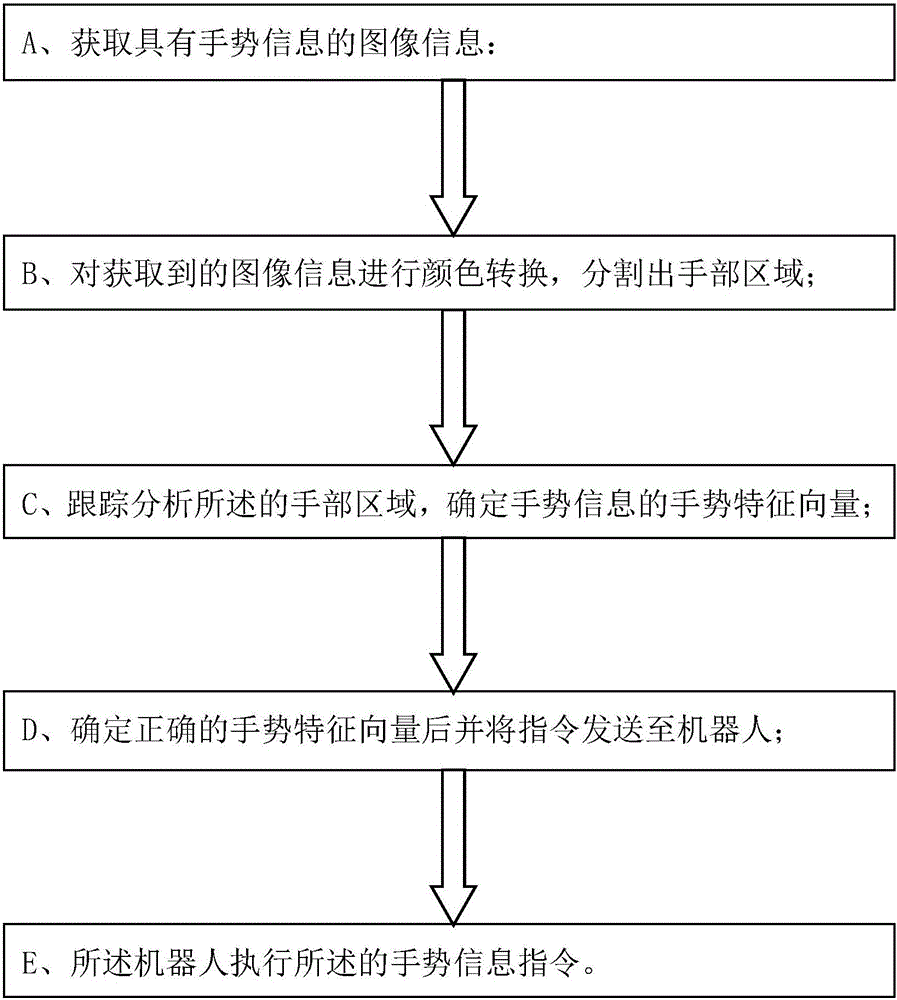
[0041] The present invention provides a gesture recognition method for a robot. In an embodiment, refer to figure 1 As shown, the recognition method at least includes the following steps: A, acquiring image information with gesture information: B, performing color conversion on the acquired image information, and segmenting the hand area; C, tracking and analyzing the hand area , determining the gesture feature vector of the gesture information; D, determining the correct gesture feature vector and sending the instruction to the robot; E, the robot executing the gesture information instruction.
[0042] Wherein the step B includes at least: B11, segmenting the skin area in the image information according to the set threshold; B12, positioning and segmenting the palm area through the set skin color model; B13, identifying ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More