

Feeding robot based on indoor electronic map, and precise positioning method for feeding robot
A technology for feeding robots and internal electronics, applied in two-dimensional position/channel control, instruments, motor vehicles, etc., can solve problems such as the inability to realize autonomous path planning and unmanned driving, and achieve the effect of solving uncertain navigation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0024] The present invention will be described in further detail below in conjunction with the accompanying drawings.
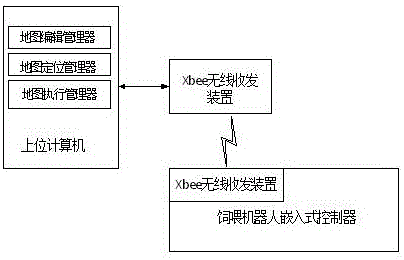
[0025] Such as figure 1 , a feeding robot based on an indoor electronic map. The feeding robot is composed of an upper control computer, an Xbee wireless transceiver device, and a feeding robot controller; An electronic map with consistent geometric dimensions; the electronic map is responsible for managing the walking path, walking speed, and feeding order of the feeding robot, and sends this information to the corresponding feeding robot controller through the Xbee wireless transceiver device; After receiving the information, the feeding robot controller runs according to the specified feeding amount, running path and running speed, and feeds back various real-time data during the running process to the upper control computer in time to update the database data.
[0026] The upper control computer adopts Advantech industrial control computer, and the main ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More