

Monocular and IMU fused stable motion tracking method and device based on mobile terminal
A motion tracking, mobile terminal technology, applied in image data processing, instrumentation, computing, etc., can solve problems such as constraints, image motion blur, tracking failure, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] In order to make the technical problems, technical solutions and advantages to be solved by the present invention clearer, the following will describe in detail with reference to the drawings and specific embodiments.
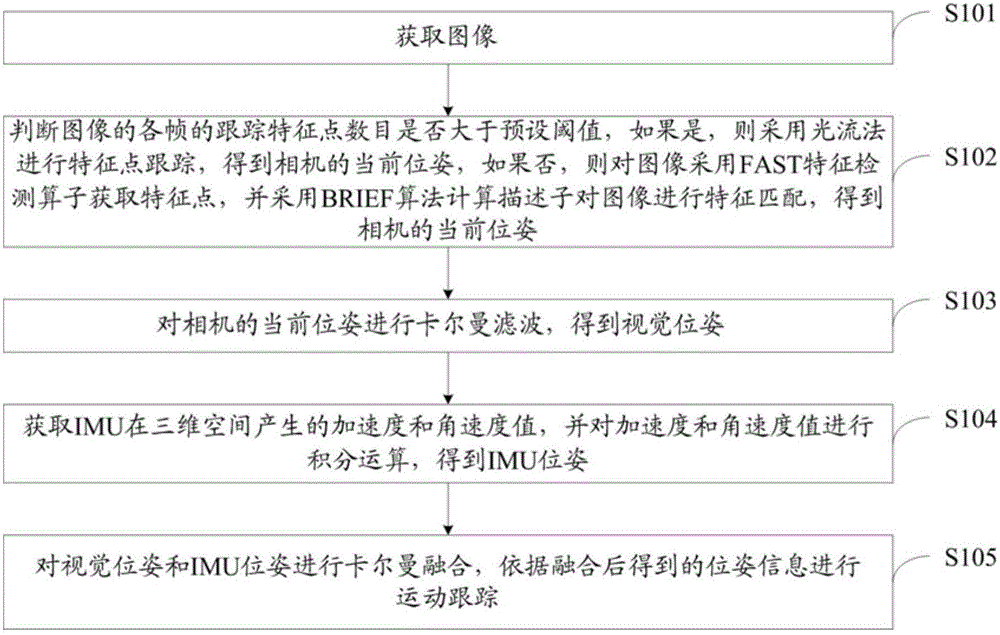
[0074] On the one hand, the present invention provides a stable motion tracking method based on mobile monocular and IMU fusion, such as figure 1 shown, including:
[0075] Step S101: acquiring an image;
[0076] Step S102: Determine whether the number of tracking feature points in the current frame of the image is greater than the preset threshold, if so, use the optical flow method to track the feature points, and obtain the current pose of the camera, if not, use the FAST feature detection operator to obtain Feature points, and use the BRIEF algorithm to calculate the descriptor to perform feature matching on the image to obtain the current pose of the camera;
[0077] This step is a motion tracking process based on monocular acquisition of visual i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More