

Non-linear-model-predictive-control FPGA hardware acceleration controller and acceleration realization method
A non-linear prediction and hardware acceleration technology, applied in the field of FPGA implementation, can solve problems such as control performance that cannot meet actual requirements, large computational burden, and poor real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
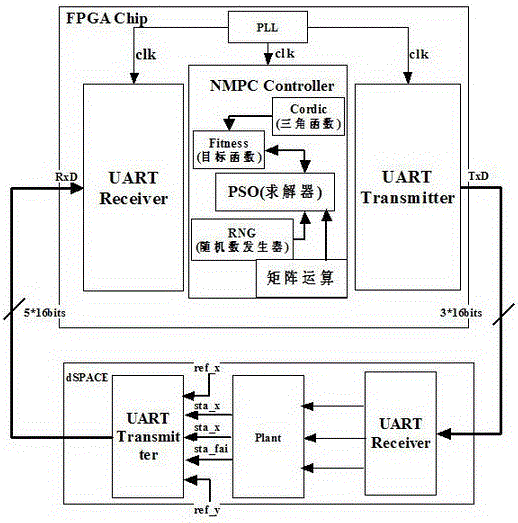
[0061] The NMPC controller and WMR trajectory tracking control block diagram based on FPGA of the present invention are as follows figure 1 As shown, it mainly includes ① NMPC module, ② interface module, ③ and WMR mathematical model. As the hardware implementation platform of NMPC controller, FPGA solves nonlinear programming problems through PSO solver, and communicates with WMR through serial port UART receiving module and sending module. The NMPC controller obtains the reference trajectory through the UART receiving module and WMR pose state signal, and transmit these data to the NMPC controller as the input signal of the controller; the NMPC controller obtains the control quantity WMR left and right wheel angular velocity through nonlinear programming and front wheel angle , the following specifically describes the implementation steps of NMPC controller design and hardware acceleration:
[0062] The hardware acceleration controller of the present invention:
[00...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More