

Control system of automatic rubber tapping robot
A technology of control system and robot, which is applied in the field of control system, can solve the problems of lack of positioning control, easy slipping of knives, low cutting accuracy, etc., and achieve the effect of simple control, good promotion and use value
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
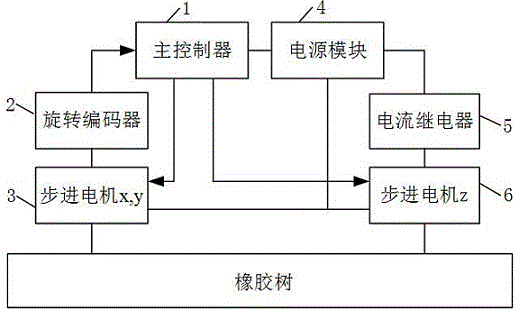
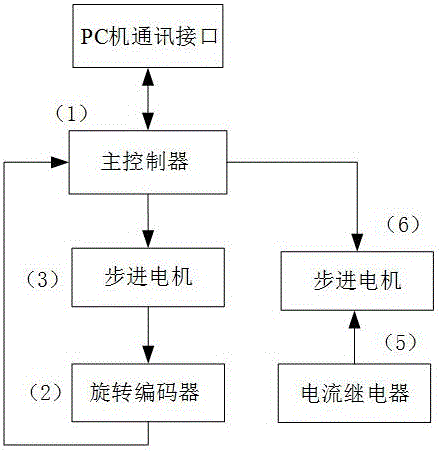
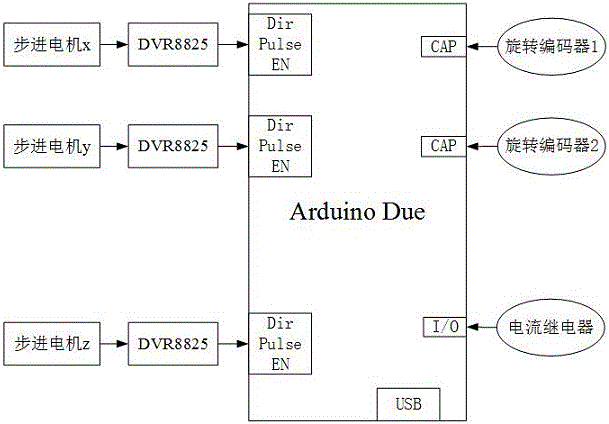
[0021] combine figure 1 -6 The present invention is further described in detail.
[0022] figure 1 It is an overall control block diagram of the control system of a wall cleaning robot capable of surmounting obstacles, and its features include: the entire control system includes a controller (1) for receiving various operating instructions and controlling the coordinated movement of various mechanisms of the tapping robot, The rotary encoder (2) used to detect the operation status of the stepping motor x, y of the tapping robot, the stepping motor x, y (3) used to drive the cutting tool of the tapping robot to perform cutting motion, and the power supply for the control system of the tapping robot The power module (4), the current sensor (5) used to control the cutting depth of the cutting tool of the rubber tapping robot at the beginning of a rubber tapping, and the stepping motor z (6) used to drive the cutting tool to cut into the rubber tree. Among them, the operator wri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More